GROLAB USERBOT HW01 Manuel D'installation

Manuels Connexes pour GROLAB USERBOT HW01



Sommaire des Matières pour GROLAB USERBOT HW01
- Page 35 NOTES...
- Page 69 ANOTACIONES...
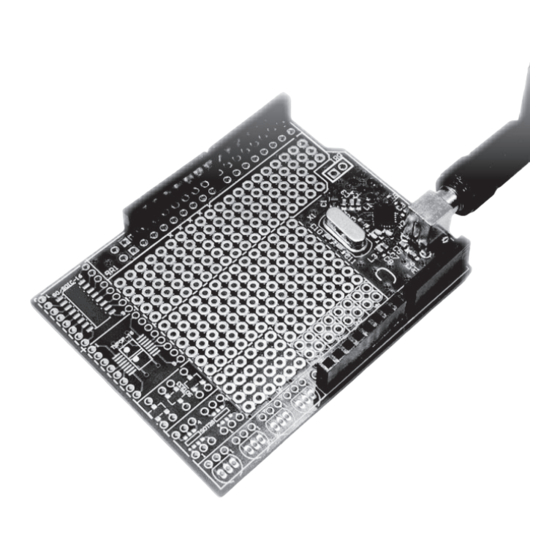
- Page 71 Antenne de communica ons RF Prise pour antenne de communica ons RF Module RF Pin d'interrup on RF Carte de développement universel Connecteurs rapides femelles Pins de connexion Arduino 4 x TO-92 2 x SOT26 3 x SSOT223 2 x TSSOP-8 (=) 1 x TSSOP-16 SOIC16...
- Page 72 TABLEAU DE SPÉCIFICATIONS Version du Hardware Dimensions 68.6mm x 53.4mm Extérieur Matériel: FR-4 Couleur: Vert Tension de Fonctionn. +3V3 VDC Connexions RP-SMA femelle Connecteurs rapides femelles (Connexion/extension Arduino) Sockets SMD 1 x SOIC16 2 x TSSOP 8 (=) 1 x TSSOP 16 3 x SSOT223 2 x SOT26 Sockets TH...
-
Page 73: Connexions De Base
INSTALACION Connexions de base Vissez l'antenne de communica on (1) sur le module à travers l'entrée filetée (2). Pour une meilleure communica on, il est recommandé que l’antenne (1) soit perpendi- culaire au module et non obstruée. Après avoir placé l’antenne, le UserBot shield est prêt à... - Page 74 Avant de monter le UserBot shield sur Arduino, vérifiez que l’Arduino est correctement assem- blé et prêt à être u lisé (suivez le manuel d’instruc on officiel Arduino). Assurez-vous également que l’Arduino n’est pas branché à l’alimenta on. Placez l’Arduino sur une surface ferme, à l’écart zones exposées inonda ons.
-
Page 75: Connexion Périphérique
Connexion périphérique Etant donné que UserBot est une extension pour Arduino, cela signifie que tout disposi f ou capteur pouvant interagir avec Arduino est également compa ble avec UserBot shield. Par conséquent, la liste des appareils et capteu- rs compa bles est extrêmement longue et il est impossible de les lister et d’expliquer leur connexion. -
Page 76: U1 Capteur De Température Lm35
Exemple 1 Connexion d'un bouton, d'un capteur de température et d'une LED. Carte de développement universel Connecteurs rapides femelles Résistance 10k (pull down) Résistance 240 pour LED Bouton tac le SPST Capteur de température LM35 Carte de développement externe... - Page 77 Le diagramme présenté à la page précédente montre la connexion de certains composants UserBot shield via les connecteurs rapides femelles (6). Le bouton tac le SPST (S1) est échan llonné dans le pin analogique A0 d’ A rduino; le capteur de température LM35 (U1) est échan llonné...
- Page 78 Exemple 2 Connexion d'un moteur CC (pompe péristal que, pompe à eau...). Carte de développement universel Connecteurs rapides femelles Moteur à courant con nu (CC) Carte de développement externe Puissance d'entrée 12VDC MOSFET type N (p. ex. IRLZ14)
- Page 79 Le diagramme présenté à la page précédente montre l'u lisa on d'un MOSFET de type N (Q1) pour contrôler la tension d'alimenta on d'un moteur à courant con nu (M1). Le moteur à courant con nu (M1) est alimenté par une source externe 12VDC (P1) et est commandé...
-
Page 80: Prépare Le Code Source
Prépare le code source Après avoir monté les capteurs et les appareils, il est temps de préparer le code source pour les contrôler. Open Grow fournit le code du micrologiciel de base dans un format open source. Le code est disponible au téléchargement à... - Page 81 Puisque le bouclier UserBot consiste essen e- llement à intégrer Arduino au système GroLab, nous u liserons l'IDE Arduino pour préparer le code. Si à un moment quelconque vous rencontrez un problème ou un obstacle avec l'IDE Arduino, consultez la documenta on officielle Arduino.
- Page 82 Avant de con nuer avec le changement de code, nous allons lister la structure du fichier et expliquer un peu: → libraries → OpenGrow • ComsTask.cpp Machine d'état pour gérer les tâches de communica on. • ComsTask.h • CRC16.cpp Calculatrice CRC par Tim W. Shilling. •...
-
Page 83: Changer Le Code
Changer le code Une fois que le code de base a été préparé, il doit être modifié pour correspondre aux composants assemblés. En résumé, dans la plupart des cas (sinon tous), il vous suffit de modifier ou de dupli- quer les fichiers suivants: →... - Page 84 Exemple 1 Connexion d'un bouton, d'un capteur de température et d'une LED. Pour interconnecter le code avec le bouton, le capteur de température et le voyant, ouvrez UserBot.ino ( examples OpenGrow → → ) et accédez à la fonc on setup. Ce e UserBot fonc on con ent la configura on pour toutes les entrées et sor es.
- Page 85 CONFIGURATION DES SORTIES Les différents types d’entrées et de sor es sont déclarés dans le fichier GroBot_Variables.h (libraries OpenGrow) sous les commentaires → ‘Possible Input Types’ et ‘Possible Output Types’. Les modifica ons dans le premier fichier sont terminées. L'étape suivante consiste à ouvrir le fichier SensorsTask.cpp ( examples OpenGrow...
- Page 86 Après avoir ouvert le fichier SensorsTask.cpp, accédez à la fonc on SensorsTask et recherchez le commentaire ‘* IO Config *’. En dessous du commentaire, vous trouverez un exemple de configura on des pins. Ce e configura on doit être ajustée pour correspondre aux composants assemblés.
- Page 87 GroLab (telles que le temps de refroidissement des périphériques sensibles). REMARQUE: Les arrays d'entrée et de sor e stockent les valeurs d'échan llons de capteur, ainsi que l'état de la sor e. Ces arrays sont essen els pour l'échange d'informa ons avec le système GroLab. 18 18...
- Page 88 Après avoir chargé le code dans votre Ardui- no, il reste une étape nécessaire pour le rendre opéra onnel et prêt à communiquer avec le système GroLab: définissez les paramètres d’usine (numéro de série et canal de communica on). Voir les instruc- ons aux pages 25 et 26.
- Page 89 Exemple 2 Connexion d'un moteur CC (pompe péristal que, pompe à eau...). Pour interconnecter le code avec le moteur CC, ouvrez le fichier UserBot.ino ( examples → ) et accédez à la OpenGrow UserBot-DCMotor → fonc on setup. Ce e fonc on con ent la configura on pour toutes les entrées et sor es.
- Page 90 CONFIGURATION DES SORTIES Les différents types d’entrées et de sor es sont déclarés dans le fichier GroBot_Variables.h (libraries OpenGrow) sous les commentaires → ‘Possible Input Types’ et ‘Possible Output Types’. Les modifica ons dans le premier fichier sont terminées. L'étape suivante consiste à ouvrir le fichier SensorsTask.cpp ( examples OpenGrow...
- Page 91 Par exemple: if (outputs[OUTPUT_INDEX0].value > 0) digitalWrite(outputs[OUTPUT_INDEX0].arduinoPin, HIGH); else digitalWrite(outputs[OUTPUT_INDEX0].arduinoPin, LOW); REMARQUE: L'array de sor e stocke les états des sor es. Cet array est essen el pour échanger des informa ons avec le système GroLab.
- Page 92 Ces modifica ons ajoutent la prise en charge de la variable ‘speed’ et d’autres fonc onnalités implémen- tées dans le système GroLab (telles que le temps de refroidissement des périphériques sensibles). Si vous devez modifier les cases de switch, vous devez modifier l’enum contenant les...
- Page 93 Une fois toutes les étapes précédentes termi- nées, le code sera prêt à gérer les compo- sants assemblés dans le diagramme de l'exemple 2. L'étape suivante consiste à compiler et à charger le code dans votre Arduino. Si vous avez besoin d’aide pour la compila on et le chargement du code, consultez la documenta on officielle Arduino ou contac- tez le centre de support Arduino.
-
Page 94: Définir Les Paramètres D'usine
Après avoir chargé le code dans votre Arduino, il reste une étape nécessaire pour le rendre opéra- onnel et prêt à communiquer avec le système GroLab: définissez les paramètres d’usine (numé- ro de série et canal de communica on). Assurez-vous que votre Arduino est connecté à... - Page 95 Envoyez la commande ‘S’ avec l’op on ‘Pas de fin de ligne’, entrez le numéro de série souhaité (n’envoyez qu’un numéro à la fois). Lorsque vous a eignez le dernier numéro, envoyez-le avec l’op on ‘Les deux, NL & CR’. Le numéro de série doit comporter 10 chiffres et commencer par le chiffre '5', par exemple '5123456789'.* Pour vérifier que la configura on a été...
-
Page 96: Connexion Avec Gronode
COMMUNICATIONS Connexion avec GroNode Assurez-vous que GroNode est correctement installé et accessible via le logiciel GroLab. Sinon, suivez les instruc ons fournies dans le manuel GroNode. Une fois toutes les étapes d'installa on de UserBot shield terminées, ouvrez le logiciel GroLab et connectez-vous à... - Page 97 (328 pieds) en plein champ en fonc on des condi ons de l'espace. Accédez au panneau Modules via le logiciel GroLab et assurez-vous que vos modules sont accessibles. S'ils ne sont pas accessibles ou présentent des problèmes de communica on, vous avez peut-être dépassé...
- Page 98 Si le problème persiste, procédez comme suit: placez le module à côté de GroNode et vérifiez le statut de la communica on via le logiciel GroLab. Si la communica on est rétablie avec succès, répétez le processus à différentes distances jusqu'à...
-
Page 99: Mise À Jour De Firmware
Mise à jour de firmware Notez que certaines mises à jour logicielles peuvent nécessiter la mise à jour du micrologi- ciel de vos modules GroLab. Toutes les mises à jour apportent des améliora- ons importantes qui garan ssent les meilleu- res performances du système. - Page 100 à la source d'alimenta on disponible. •Assurez-vous également que vos modules GroLab et les périphériques •Assurez-vous également que vos modules GroLab et les périphériques connectés sont qualifiés sur le plan électrique pour fonc onner avec le connectés sont qualifiés sur le plan électrique pour fonc onner avec le...
-
Page 101: Garantie
GARANTIE Open Grow, LDA, garan t au consommateur que le produit est exempt de défauts de matériau et/ou de fabrica on. La responsabilité de Open Grow, LDA, se limite à la répara on ou au remplacement des pièces défectueuses. Avant de nous envoyer des pièces défectueuses, contactez notre centre de support pour vérifier la procédure. - Page 102 CONFORMITÉ Ce symbole sur le produit ou son emballage signifie que, conformément à la législa on et aux réglementa ons locales en vigueur, ce produit ne doit pas être jeté avec les ordures ménagères, mais doit être envoyé au recyclage. S'il vous plaît apportez-le à un point de collecte désigné par vos autorités locales une fois que vous avez a eint la fin de sa vie u le, certains accepteront les produits gratuitement.
- Page 103 INSCRIPTIONS...
- Page 137 NOTAS...
- Page 171 ISCRIZIONI...
- Page 172 IMUB2019V01 ® Specifica ons are subject to change without no ce. GroLab is a registered trademark of Open Grow, LDA. Other brands and product names are trademarks or registered trademarks of their respec ve holders. No part of the specifica ons may be reproduced in any form or by any means or used to make any deriva ve such as transla on, transforma on, or adapta on without permission from Open Grow, LDA.