Table des Matières
Publicité
Liens rapides
Publicité
Table des Matières

Manuels Connexes pour Universal Robots UR10/CB3















Sommaire des Matières pour Universal Robots UR10/CB3
- Page 1 Manuel d’utilisation UR10/CB3 Traduction des instructions d’origine (fr)
- Page 3 Manuel d’utilisation UR10/CB3 Version 3.1 (rev. 18026) Traduction des instructions d’origine (fr) Num ´ ero de s ´ erie UR10 : Num ´ ero de s ´ erie CB3 :...
- Page 4 Robots A/S. Les informations du pr´ e sent document peuvent ˆ e tre modifi´ e es sans pr´ e avis et ne doivent pas ˆ e tre interpr´ e t´ e es comme un engagement de la part d’Universal Robots A/S. Ce manuel est revu et r´...
-
Page 5: Table Des Matières
Entr´ e es num´ e riques de l’outil ....I-30 4.4.3 Entr´ e es analogiques de l’outil ....I-30 Version 3.1 (rev. 18026) UR10/CB3... - Page 6 10.1.4 D´ e marrage rapide ..... . II-4 10.1.5 Le premier programme ....II-5 UR10/CB3 Version 3.1 (rev. 18026)
- Page 7 Onglet Programme ......II-44 13.2.1 Arborescence programme ....II-44 Version 3.1 (rev. 18026) UR10/CB3...
- Page 8 Modes de s´ e curit´ e ......II-88 15.6 Mode fonctionnement libre ..... . II-89 UR10/CB3 Version 3.1 (rev. 18026)
- Page 9 15.12 E/S de s´ e curit´ e ......II-101 Glossary II-103 Index II-105 Version 3.1 (rev. 18026) UR10/CB3...
- Page 10 UR10/CB3 viii Version 3.1 (rev. 18026)
-
Page 11: Pr´ E Face
– Cˆ a ble secteur compatible pour votre r´ e gion ; – Cˆ a ble pour l’outil ; – Stylet avec laser ; – Certificat de test de production UR ; – Le pr´ e sent manuel. Version 3.1 (rev. 18026) UR10/CB3... -
Page 12: Avis De S´ E Curit´ E Important
ı tre les concepts ´ e l´ e mentaires de la programmation. Aucune connaissance sp´ e ciale des robots en g´ e n´ e ral ou d’Universal Robots en particulier n’est n´ e cessaire. O ` u trouver des informations compl ´ ementaires Le site web d’assistance (http://support.universal-robots.com/), ` a la dis-... -
Page 13: I Manuel D'installation Du Mat´ E Riel I
Premi` e re partie Manuel d’installation du mat´ e riel... -
Page 15: E Curit´ E
Toute information donn´ e e dans ce manuel concernant la s´ e curit´ e ne doit pas ˆ e tre interpr´ e t´ e e comme une garantie de la part d’UR que le manipulateur industriel ne Version 3.1 (rev. 18026) UR10/CB3... -
Page 16: Symboles D'avertissement Contenus Dans Ce Manuel
Certains d’entre eux sont r´ e p´ e t´ e s ou expliqu´ e s dans diff´ e rentes parties du manuel. D’autres avertissements et mises en garde sont pr´ e sents tout au long du manuel. UR10/CB3 Version 3.1... - Page 17 10. Restez attentif au mouvement du robot lorsque vous utilisez le Teach Pendant. 11. Ne pas p´ e n´ e trer dans la plage de s´ e curit´ e du robot ou toucher le robot lorsque le syst` e me est en fonctionnement. Version 3.1 (rev. 18026) UR10/CB3...
- Page 18 ` a la version la plus r´ e cente de tous les manuels d’entretien concern´ e s. UNIVERSAL ROBOTS D ´ ECLINE TOUTE RESPONSABILIT ´ E SI LE PRODUIT A ´ ET ´ E CHANG ´...
-
Page 19: Usage Pr´ E Vu
´ e valuation des risques. Le robot proprement dit est une machine partiellement finie. La s´ e curit´ e de l’installation du robot d´ e pend donc de la fac ¸ on dont le robot est int´ e gr´ e (par ex. outil, obstacles et autres machines). Version 3.1 (rev. 18026) UR10/CB3... -
Page 20: Arrˆ E T D'urgence
) pour le prot´ e ger pendant la programmation. Universal Robots a identifi´ e les dangers importants potentiels ´ e num´ e r´ e s ci-dessous comme dangers qui doivent ˆ e tre ´ e tudi´ e s par l’int´ e grateur. Noter que d’autres dan- gers importants pourraient ˆ... - Page 21 2. En cas de relˆ a chement manuel du frein, la gravit´ e peut en- traˆ ı ner la chute du bras du robot. Toujours soutenir le bras du robot, l’outil et la pi` e ce ` a travailler au moment de relˆ a cher le frein. Version 3.1 (rev. 18026) UR10/CB3...
- Page 22 1.9 Mouvement sans puissance d’excitation UR10/CB3 I-10 Version 3.1 (rev. 18026)
-
Page 23: Transport
´ e quipement de levage ad´ e quat. Toutes les consignes r´ e gionales et nationales en mati` e re de levage doivent ˆ e tre sui- vies. Universal Robots ne peut ˆ e tre tenue pour responsable des dommages caus´ e s par le transport de l’´ e quipement. - Page 24 UR10/CB3 I-12 Version 3.1 (rev. 18026)
-
Page 25: Interface M´ E Canique
Installer le robot sur une surface suffisamment robuste pour supporter au moins dix fois le couple complet de l’articulation de base et au moins cinq fois le poids du bras du robot. En outre, la surface doit ˆ e tre exempte de vibrations. Version 3.1 (rev. 18026) I-13 UR10/CB3... - Page 26 fixer un outil au robot. Les trous doivent ˆ e tre serr´ e s ` a un couple de 9 N m. Le trou de Ø6 est pr´ e vu pour ˆ e tre utilis´ e avec une broche lorsqu’un repositionnement tr` e s UR10/CB3 I-14 Version 3.1...
- Page 27 ˆ e tre expos´ e s ` a des environnements poussi´ e reux ou humides d´ e passant un indice de protection IP20. Il convient de prendre un soin tout particulier dans les environnements ` a poussi` e re conductrice. Version 3.1 (rev. 18026) I-15 UR10/CB3...
- Page 28 3.2 Montage 40,2 3.2 – La bride de sortie d’outil, ISO 9409-1-50-4-M6. ` A cet endroit, l’outil est mont´ e sur IGURE l’extr´ e mit´ e du robot. Toutes les mesures sont en mm. UR10/CB3 I-16 Version 3.1 (rev. 18026)
-
Page 29: Interface ´ Electrique
3. Certaines E/S ` a l’int´ e rieur du boˆ ı tier contr ˆ oleur peuvent ˆ e tre configur´ e es pour les E/S normales ou de s´ e curit´ e . Lire et com- prendre la section 4.3 dans son int´ e gralit´ e . Version 3.1 (rev. 18026) I-17 UR10/CB3... - Page 30 Universal Robots ne peut ˆ e tre tenue pour responsable des dommages caus´ e s par des probl` e mes de CEM.
-
Page 31: E/S Du Contr ˆ Oleur
(24 V et 0 V) du bloc sont les entr´ e es 24 V qui alimentent les E/S. La configuration par d´ e faut consiste ` a utiliser l’alimentation ´ e lectrique interne, voir ci-dessous. Version 3.1 (rev. 18026) I-19 UR10/CB3... - Page 32 Le mot configurable est utilis´ e pour les E/S qui peuvent ˆ e tre confi- gur´ e es comme des E/S de s´ e curit´ e ou des E/S normales. Il s’agit des bornes jaunes avec texte en noir. UR10/CB3 I-20 Version 3.1...
- Page 33 E/S configurables pour les fonctions de s´ e curit´ e est r´ e alis´ e e par le biais de la GUI, voir partie II. Des exemples de la fac ¸ on d’utiliser les E/S de s´ e curit´ e sont illustr´ e s dans les sous- sections suivantes. Version 3.1 (rev. 18026) I-21 UR10/CB3...
-
Page 34: Configuration De S ´ Ecurit ´ E Par D ´ Efaut
Dans la plupart des applications, il est n´ e cessaire d’utiliser un ou plusieurs boutons d’arrˆ e t d’urgence suppl´ e mentaires. L’illustration ci-dessous montre le fonctionne- ment d’un ou de plusieurs boutons d’arrˆ e t d’urgence. Safety Safety UR10/CB3 I-22 Version 3.1 (rev. 18026) -
Page 35: Partage De L'arr ˆ Et D'urgence Avec D'autres Machines
Les E/S configurables peuvent ˆ e tre utilis´ e es pour configurer un bouton de r´ e initialisation ` a l’ext´ e rieur de la porte, afin de r´ e activer le mouvement du robot. Version 3.1 (rev. 18026) I-23 UR10/CB3... -
Page 36: Arr ˆ Et De Protection Avec Bouton De R ´ Einitialisation
ˆ e tre respect´ e es. Les E/S ` a usages multiples peuvent ˆ e tre utilis´ e es pour entraˆ ı ner des ´ e quipements tels que des relais pneumatiques directement ou pour communiquer avec d’autres UR10/CB3 I-24 Version 3.1... -
Page 37: Charge Contr ˆ Ol ´ Ee Par Une Sortie Num ´ Erique
L’interface des E/S analogiques est la borne verte. Elle peut ˆ e tre utilis´ e e pour pa- ram´ e trer ou mesurer la tension (0-10 V) ou le courant (4-20 mA) depuis et vers d’autres ´ e quipements. Version 3.1 (rev. 18026) I-25 UR10/CB3... -
Page 38: Utiliser Une Sortie Analogique
Les exemples suivants montrent comment utiliser les E/S analogiques. 4.3.6.1 Utiliser une sortie analogique Ci-dessous se trouve un exemple montrant comment contr ˆ oler une bande de trans- port avec une entr´ e e de commande de vitesse analogique. Analog Power UR10/CB3 I-26 Version 3.1 (rev. 18026) -
Page 39: Utiliser Une Entr ´ Ee Analogique
Les exemples suivants montrent comment utiliser la commande marche/arrˆ e t ` a distance. REMARQUE: Une fonction sp´ e ciale du logiciel peut ˆ e tre utilis´ e e pour charger et d´ e marrer les programmes automatiquement, voir partie II Version 3.1 (rev. 18026) I-27 UR10/CB3... -
Page 40: Bouton Arr ˆ Et ` A Distance
Sortie num´ e rique 9 (DO9) Jaune Entr´ e e num´ e rique 8 (DI8) Vert Entr´ e e num´ e rique 9 (DI9) Blanc Entr´ e e analogique 2 (AI2) Marron Entr´ e e analogique 3 (AI3) UR10/CB3 I-28 Version 3.1 (rev. 18026) -
Page 41: Sorties Num´ E Riques De L'outil
1. Les sorties num´ e riques de l’outil ne sont pas limit´ e es en cou- rant et le fait de d´ e passer les donn´ e es sp´ e cifi´ e es peut causer des dommages irr´ e m´ e diables. Version 3.1 (rev. 18026) I-29 UR10/CB3... -
Page 42: Utiliser Les Sorties Num ´ Eriques De L'outil
R´ e sistance d’entr´ e e ` a la plage 4mA ` a 20mA Deux exemples de la fac ¸ on d’utiliser les entr´ e es analogiques sont illustr´ e s dans les sous-sections suivantes. UR10/CB3 I-30 Version 3.1 (rev. 18026) -
Page 43: Ethernet
II. – Acc` e s et commande ` a distance. Les caract´ e ristiques ´ e lectriques sont indiqu´ e es ci-dessous. Param` e tre Min. Type Max. Unit´ e Vitesse de communication Mb/s Version 3.1 (rev. 18026) I-31 UR10/CB3... -
Page 44: Connexion Secteur
Les caract´ e ristiques ´ e lectriques sont indiqu´ e es dans le tableau ci-dessous. Param` e tre Min. Type Max. Unit´ e Tension d’entr´ e e Fusible secteur externe (@ 100-200V) Fusible secteur externe (@ 200-240V) Fr´ e quence d’entr´ e e Consommation en veille Puissance nominale UR10/CB3 I-32 Version 3.1 (rev. 18026) -
Page 45: Connexion Du Robot
ˆ e tre effectu´ e que lorsque le robot est hors tension. ATTENTION: 1. Ne pas d´ e connecter le cˆ a ble du robot lorsque le bras du robot est sous tension. 2. Ne pas rallonger ou modifier le cˆ a ble d’origine. Version 3.1 (rev. 18026) I-33 UR10/CB3... - Page 46 4.7 Connexion du robot UR10/CB3 I-34 Version 3.1 (rev. 18026)
-
Page 47: Fonctions Et Interfaces De S´ E Curit´ E
Le logiciel de contr ˆ ole de trajectoire avanc´ e r´ e duit la vitesse ou ´ e met un arrˆ e t d’ex´ e cution du programme si le bras du robot s’approche d’une limite de s´ e curit´ e . Les viola- Version 3.1 (rev. 18026) I-35 UR10/CB3... -
Page 48: Certaines Zones De L'espace De Travail Doivent Faire L'objet D'une Attention Particuli` E Re
´ e lectrique inf´ e rieur ` a 7,3 V. Le temps de d´ e sactivation est le temps ´ e coul´ e entre la d´ e tection d’un ´ e v´ e nement et la d´ e sactivation du syst` e me. UR10/CB3 I-36 Version 3.1... -
Page 49: Modes De S´ E Curit´ E
Impulsion kg m Puissance 80 W Le syst` e me de s´ e curit´ e ´ e met un arrˆ e t de cat´ e gorie 0 en cas de violation de ces limites. Version 3.1 (rev. 18026) I-37 UR10/CB3... -
Page 50: Interfaces ´ E Lectriques De S´ E Curit´ E
` a une entr´ e e d’arrˆ e t de protection, le bras du robot ne peut recommen- cer ` a bouger qu’apr` e s la survenance d’un front positif sur l’entr´ e e de r´ e initialisation UR10/CB3 I-38 Version 3.1... -
Page 51: Sorties ´ E Lectriques De S´ E Curit´ E
250 ms 1000 ms 1250 ms 5.3.2 Sorties ´ electriques de s ´ ecurit ´ e Le tableau ci-dessous donne une vue d’ensemble des sorties ´ e lectriques de s´ e curit´ e . Version 3.1 (rev. 18026) I-39 UR10/CB3... - Page 52 Arrˆ e t d’urgence syst` e me 1100 ms Le robot se d´ e place 1100 ms Le robot ne s’arrˆ e te pas 1100 ms Mode r´ e duit 1100 ms Mode non r´ e duit 1100 ms UR10/CB3 I-40 Version 3.1 (rev. 18026)
-
Page 53: Maintenance Et R´ E Paration
Les r´ e parations doivent ˆ e tre effectu´ e es uniquement par des int´ e grateurs syst` e me agr´ e ´ e s ou par Universal Robots. Toutes les pi` e ces renvoy´ e es ` a Universal Robots doivent ˆ e tre renvoy´ e es conform´ e ment au manuel d’entretien. - Page 54 ´ e quivalents approuv´ e s pour cet usage par Universal Robots. 3. R´ e activer toute mesure de s´ e curit´ e d´ e sactiv´ e e d` e s que les tra- vaux sont termin´...
-
Page 55: Elimination Et Environnement
ˆ e tre consult´ e e ici : https://www.ewrn.org/ national-registers. Les symboles suivants sont appos´ e s sur le robot afin d’indiquer sa conformit´ e aux l´ e gislations susmentionn´ e es : Version 3.1 (rev. 18026) I-43 UR10/CB3... - Page 56 UR10/CB3 I-44 Version 3.1 (rev. 18026)
-
Page 57: Certifications
2009/127/CE. La d´ e claration d’incorporation selon la norme 2006/42/CE annexe II 1.B. peut ˆ e tre consult´ e e ` a l’annexe B. Version 3.1 (rev. 18026) I-45 UR10/CB3... - Page 58 Concernant les d´ e chets d’´ e quipements ´ e lectriques et ´ e lectroniques, reportez- vous au chapitre 7. Pour de plus amples informations concernant les normes appliqu´ e es au cours du d´ e veloppement du robot, voir l’annexe C. UR10/CB3 I-46 Version 3.1 (rev. 18026)
-
Page 59: Garanties
` a d’autres ´ e quipements de production. Dans le cas d’un dispositif qui pr´ e sente des d´ e fauts, Universal Robots ne couvre au- cun dommage ni aucune perte indirects, tels que perte de production ou dommage ` a d’autres ´... -
Page 60: Clause De Non Responsabilit´ E
9.2 Clause de non responsabilit ´ e tions manquantes. UR10/CB3 I-48 Version 3.1 (rev. 18026) -
Page 61: A Heure D'arrˆ E T Et Distance D'arrˆ E T I
´ e taient parall` e les au sol, et l’arrˆ e t a ´ e t´ e effectu´ e pendant que le robot se d´ e plac ¸ ait vers le bas. Distance d’arrˆ e t (rad) Temps d’arrˆ e t (ms) Articulation 0 (BASE) 0.98 Articulation 1 ( ´ EPAULE) 0.35 Articulation 2 (COUDE) 0.38 Version 3.1 (rev. 18026) I-49 UR10/CB3... - Page 62 A.1 Distances et temps d’arr ˆ et de CAT ´ EGORIE 0 UR10/CB3 I-50 Version 3.1 (rev. 18026)
-
Page 63: B D´ E Clarations Et Certificats
B D ´ eclarations et certificats B.1 CE Declaration of Incorporation (original) According to European directive 2006/42/EC annex II 1.B. The manufacturer Universal Robots A/S Energivej 25 5260 Odense S Denmark +45 8993 8989 hereby declares that the product described below... -
Page 64: B.2 D´ E Claration D'incorporation Ce (Traduction De L'original)
B.2 D ´ eclaration d’incorporation CE (traduction de l’original) B.2 D ´ eclaration d’incorporation CE (traduction de l’original) En vertu de la directive europ´ e enne 2006/42/CE annexe II 1.B. Le fabricant Universal Robots A/S Energivej 25 5260 Odense S Danemark +45 8993 8989 d´... -
Page 65: B.3 Certificat Du Syst` E Me De S´ E Curit´ E
B.3 Certificat du syst ` eme de s ´ ecurit ´ e B.3 Certificat du syst ` eme de s ´ ecurit ´ e Version 3.1 (rev. 18026) I-53 UR10/CB3... -
Page 66: B.4 Certificat De Test Environnemental
B.4 Certificat de test environnemental B.4 Certificat de test environnemental Climatic and mechanical assessment sheet no. 1275 DELTA client DELTA project no. Universal Robots A/S T207415-1 Energivej 25 5260 Odense S Denmark Product identification UR5 robot arm: UR5 AE/CB3, 0A-series... -
Page 67: B.5 Certificat De Test Cem
B.5 Certificat de test CEM B.5 Certificat de test CEM EMC assessment sheet no. 1277 DELTA client DELTA project no. Universal Robots A/S T207371 Energivej 25 5260 Odense S Denmark Product identification UR5 robot arm with control box and teach pendant: UR5 AE/CB3, 0A-series... - Page 68 B.5 Certificat de test CEM UR10/CB3 I-56 Version 3.1 (rev. 18026)
-
Page 69: C Normes Appliqu´ E Es
1 est un arrˆ e t contr ˆ ol´ e avec les moteurs laiss´ e s sous tension pour obtenir l’arrˆ e t, puis leur mise hors tension une fois l’arrˆ e t obtenu. Version 3.1 (rev. 18026) I-57 UR10/CB3... - Page 70 La fonction de limitation de la puissance et de la force est conc ¸ ue conform´ e ment ` a la clause 5.10.5. UR10/CB3 I-58 Version 3.1...
- Page 71 Universal Robots est un membre actif du comit´ e international qui d´ e veloppe cette TS (ISO/TC 184/SC 2). Il se peut qu’une version finale soit publi´ e e en 2015.
- Page 72 Cette norme d´ e finit les capacit´ e s nominales des boˆ ı tiers concernant la protection contre la poussi` e re et l’eau. Les robots UR sont conc ¸ us et class´ e s avec un code IP selon cette norme, voir l’autocollant du robot. UR10/CB3 I-60 Version 3.1...
- Page 73 EN 60068-2-2 :2007 EN 60068-2-27 :2009 EN 60068-2-64 :2008 Environmental testing Part 2-1: Tests - Test A: Cold Part 2-2: Tests - Test B: Dry heat Part 2-27: Tests - Test Ea and guidance: Shock Version 3.1 (rev. 18026) I-61 UR10/CB3...
- Page 74 Electrical Interface between Injection Molding Machine and Handling Device / Robot Les robots UR ´ e quip´ e s du module d’accessoires E67 pour faire l’interface avec les machines de moulage par injection sont conformes ` a cette norme. UR10/CB3 I-62 Version 3.1...
-
Page 75: D Caract´ E Ristiques Techniques
C ˆ able entre le robot et le boˆ ı tier contr ˆ oleur (6 m / 236 in) C ˆ able entre l’ ´ ecran tactile et le boˆ ı tier contr ˆ oleur (4.5 m / 177 in) Version 3.1 (rev. 18026) I-63 UR10/CB3... - Page 76 UR10/CB3 I-64 Version 3.1 (rev. 18026)
-
Page 77: Manuel Polyscope
Deuxi` e me partie Manuel PolyScope... -
Page 79: Introduction
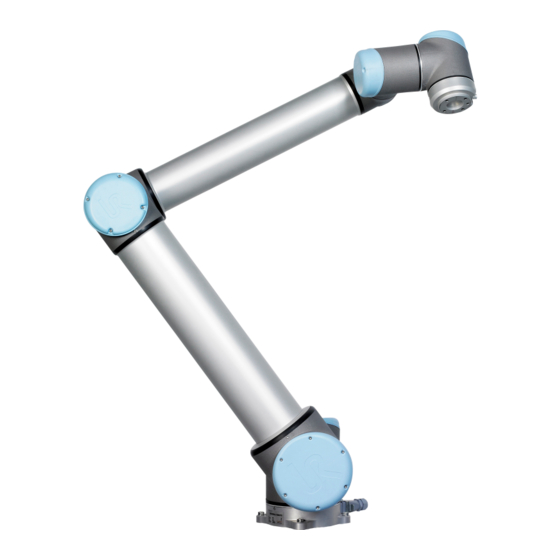
10 Introduction Le bras Universal Robots est compos´ e de tubes en aluminium extrud´ e et d’articula- tions. Les articulations avec leurs noms habituels sont illustr´ e es sur la Figure 10.1. Le robot est mont´ e sur la Base et ` a l’autre extr´ e mit´ e (Poignet 3), l’outil du robot est fix´... -
Page 80: Mettre Le Boˆ I Tier Contr ˆ Oleur Sous Et Hors Tension
10.1 Prise en main AVERTISSEMENT: Risque de tr´ e buchement. Si le robot n’est pas solidement posi- tionn´ e sur une surface r´ e sistante, le robot peut tomber et provo- quer des blessures. Des instructions d’installation d´ e taill´ e es peuvent ˆ e tre consult´ e es dans le Manuel d’installation du mat´... -
Page 81: Le Premier Programme
10.1 Prise en main 5. Appuyer sur le bouton de la boˆ ı te de dialogue contextuelle. Vous serez dirig´ e vers l’´ e cran d’initialisation. 6. Attendre que la fenˆ e tre de dialogue Confirmation de la configuration de s´ e curit´ e appliqu´ e e et appuyer sur le bouton Confirmer configuration de s´... -
Page 82: Interface De Programmation Polyscope
10.2 Interface de programmation PolyScope 5. Aller ` a l’onglet Commande. 6. Appuyer sur le bouton Suivant afin d’aller aux r´ e glages du Point de passage. 7. Appuyer sur le bouton R´ e gler ce point de passage ` a c ˆ ot´ e de l’image ?. 8. - Page 83 10.2 Interface de programmation PolyScope L’image ci-dessus montre l’´ e cran de bienvenue. Les zones bleuˆ a tres de l’´ e cran cor- respondent ` a des boutons qui peuvent ˆ e tre activ´ e s en appuyant avec un doigt ou le haut d’un stylo contre l’´...
-
Page 84: Ecran De Bienvenue
10.3 ´ Ecran de bienvenue ´ Ecran de bienvenue 10.3 Apr` e s avoir d´ e marr´ e le PC contr ˆ oleur, l’´ e cran de bienvenue est affich´ e . L’´ e cran offre les options suivantes : –... -
Page 85: Ecran D'initialisation
10.4 ´ Ecran d’initialisation ´ Ecran d’initialisation 10.4 Cet ´ e cran vous permet de contr ˆ oler l’initialisation du bras du robot. Indicateur d’ ´ etat du bras du robot La LED d’´ e tat donne une indication de l’´ e tat de marche du bras du robot : –... -
Page 86: Initialiser Le Bras Du Robot
10.4 ´ Ecran d’initialisation Avant de d´ e marrer le bras du robot, il est tr` e s important de v´ e rifier que la charge utile active et l’installation active correspondent ` a la situation r´ e elle dans laquelle se situe le bras du robot. -
Page 87: Editeurs ` A L'´ E Cran
´ Editeurs ` a l’ ´ ecran 11.1 Pav ´ e ` a l’ ´ ecran Fonctions simples de saisie et d’´ e dition de chiffres. Dans de nombreux cas, l’unit´ e de la valeur saisie est affich´ e e ` a c ˆ ot´ e du chiffre. Version 3.1 (rev. -
Page 88: Clavier ` A L'´ E Cran
11.3 ´ Editeur d’expression ` a l’ ´ ecran 11.2 Clavier ` a l’ ´ ecran Fonctions simples de saisie et d’´ e dition de texte. La touche Shift (majuscules) peut ˆ e tre utilis´ e e pour obtenir quelques caract` e res sp´ e ciaux suppl´ e mentaires. ´... -
Page 89: Ecran ´ Editeur Pose
11.4 ´ Ecran ´ Editeur Pose symboles sp´ e ciaux d’expression, comme par ex. pour multiplication et pour inf´ e rieur ou ´ e gal ` a . Le bouton symbolisant le clavier en haut ` a droite de l’´ e cran per- met de changer pour l’´... -
Page 90: Fonction Et Position De L'outil
11.4 ´ Ecran ´ Editeur Pose proximit´ e est montr´ e e. Les plans de s´ e curit´ e sont visualis´ e s en jaune et noir avec une petite fl` e che repr´ e sentant le plan normal, qui indique le c ˆ ot´ e du plan sur lequel le point central de l’outil du robot peut ˆ... -
Page 91: Bouton Annuler
11.4 ´ Ecran ´ Editeur Pose puyer et maintenir enfonc´ e un bouton pour augmenter/diminuer directement la valeur. Plus le bouton est enfonc´ e , plus l’augmentation/diminution sera impor- tante. Bouton OK Si cet ´ e cran a ´ e t´ e activ´ e ` a partir de l’onglet D´ e placement (voir 12.1), cliquer sur le bouton OK pour revenir ` a l’onglet D´... - Page 92 11.4 ´ Ecran ´ Editeur Pose II-16 Version 3.1 (rev. 18026)
-
Page 93: Contr ˆ Ole Du Robot
12 Contr ˆ ole du robot 12.1 Onglet D ´ eplacement Cet ´ e cran vous permet toujours de directement d´ e placer (faire avancer pas ` a pas) le bras du robot, soit en effectuant une translation/une rotation de l’outil du robot, soit en d´... -
Page 94: D´ E Placer L'outil
12.1 Onglet D ´ eplacement L’int´ e rieur du c ˆ one repr´ e sente la zone autoris´ e e pour l’orientation de l’outil (vec- teur). Lorsque le point central de l’outil du robot n’est plus ` a proximit´ e de la limite, la repr´... -
Page 95: Onglet E/S
12.2 Onglet E/S AVERTISSEMENT: 1. Veiller ` a utiliser les param` e tres d’installation corrects (par ex. angle de montage du robot, poids dans le point central de l’outil, d´ e calage du point central de l’outil). Enregistrer et charger les fichiers d’installation avec le programme. 2. -
Page 96: E/S Client Modbus
12.3 E/S client MODBUS Les E/S configurables peuvent ˆ e tre r´ e serv´ e es pour des param` e tres de s´ e curit´ e sp´ e ciaux d´ e finis dans la section de configuration des E/S de s´ e curit´ e de l’installation (voir 15.12) ; celles qui sont r´... -
Page 97: Onglet Automove
12.4 Onglet AutoMove 12.4 Onglet AutoMove L’onglet AutoMove est utilis´ e lorsque le bras du robot doit se d´ e placer vers une position sp´ e cifique dans son espace de travail. Par exemple, lorsque le bras du robot doit se d´ e placer vers la position de d´ e part d’un programme avant de l’ex´ e cuter, ou lorsqu’il se d´... -
Page 98: Installation Charger/Enregistrer
12.5 Installation Charger/Enregistrer Manuel Appuyer sur le bouton Manuel pour ˆ e tre dirig´ e vers l’onglet D´ e placement o ` u le bras du robot peut ˆ e tre d´ e plac´ e manuellement. Ceci est uniquement n´ e cessaire si le mouvement de l’animation n’est pas pr´... -
Page 99: Installation Configuration Point Central De L'outil
12.6 Installation Configuration point central de l’outil ATTENTION: L’utilisation du robot avec une installation charg´ e e ` a partir d’un p´ e riph´ e rique USB n’est pas recommand´ e e. Pour utiliser une ins- tallation stock´ e e sur un p´ e riph´ e rique USB, il faut la charger puis l’enregistrer dans le dossier Programmes local ` a l’aide du bouton Enregistrer sous.. -
Page 100: Le Tcp Par D´ E Faut Et Le Tcp Actif
12.6 Installation Configuration point central de l’outil 12.6.2 Le TCP par d ´ efaut et le TCP actif Un seul des TCP configur´ e s est le TCP par d´ e faut. Le TCP par d´ e faut est indiqu´ e par une ic ˆ... -
Page 101: Apprentissage De L'orientation Tcp
12.6 Installation Configuration point central de l’outil De plus, mˆ e me si trois positions sont g´ e n´ e ralement suffisantes pour d´ e terminer le TCP correct, la quatri` e me position peut ˆ e tre utilis´ e e pour v´ e rifier que le calcul est correct. -
Page 102: Installation Montage
12.7 Installation Montage AVERTISSEMENT: Veiller ` a utiliser les param` e tres d’installation corrects. Enregistrer et charger les fichiers d’installation avec le programme. 12.7 Installation Montage ` A ce niveau, le montage du bras du robot peut ˆ e tre sp´ e cifi´ e . Cela a deux objectifs : 1. -
Page 103: Installation Configuration E/S
12.8 Installation Configuration E/S permettent le r´ e glage de l’angle de montage du bras du robot. Les trois premiers boutons du c ˆ ot´ e droit d´ e finissent l’angle au plafond (180 ), mur (90 ), sol (0 ). Les boutons Incliner permettent de r´... -
Page 104: Installation Variables
12.10 Installation Variables De plus, les huit entr´ e es num´ e riques standard et les deux entr´ e es de l’outil peuvent ˆ e tre configur´ e es de fac ¸ on ` a refl´ e ter l’ex´ e cution actuelle d’un programme, de telle sorte que la sortie soit haute lorsqu’un programme est en cours d’ex´... -
Page 105: Installation Configuration Client E/S Modbus
12.11 Installation Configuration client E/S MODBUS l’un ou l’autre des champs textuels. Il est uniquement possible de cliquer sur le bouton OK si le nouveau nom est inutilis´ e dans cette installation. Il est possible de modifier la valeur d’une variable d’installation en surlignant la variable dans la liste puis en cliquant sur Modifier valeur. -
Page 106: Ajouter Signal
12.11 Installation Configuration client E/S MODBUS Supprimer unit ´ e Appuyer sur ce bouton pour supprimer l’unit´ e MODBUS et tous les signaux de l’unit´ e . R ´ egler unit ´ e IP Ici, l’adresse IP de l’unit´ e MODBUS est indiqu´ e e. Appuyer sur le bouton pour la modifier. -
Page 107: Valeur Signal
12.11 Installation Configuration client E/S MODBUS Valeur signal Ici, la valeur actuelle du signal est indiqu´ e e. Pour les signaux de registres, la valeur est exprim´ e e en tant que nombre entier non sign´ e . Pour les signaux de sortie, la valeur de signal d´... -
Page 108: Installation Fonctions
12.12 Installation Fonctions 12.12 Installation Fonctions Les clients qui ach` e tent des robots industriels souhaitent g´ e n´ e ralement ˆ e tre ca- pables de contr ˆ oler ou manipuler un bras de robot et de programmer le bras du robot en fonction de divers objets et limites dans l’environnement du bras du robot, tels que machines, objets ou vides, appareils fixes, convoyeurs, palettes ou syst` e mes de vision. - Page 109 Bien qu’il y ait de multiples raisons qui fassent que cela pour- rait ˆ e tre le cas, et afin de traiter ces probl` e mes, Universal Robots a d´ e velopp´ e une m´ e thode unique et simple permettant au client de d´ e finir la position de diff´ e rents objets par rapport au bras du robot.
- Page 110 12.12 Installation Fonctions point. L’orientation de la fonction du point est la mˆ e me que celle du centre-outil, ex- cept´ e que le syst` e me de coordonn´ e es de la fonction est tourn´ e de 180 degr´ e s autour de son axe x.
- Page 111 12.12 Installation Fonctions Ajouter plan Appuyer sur ce bouton pour ajouter la fonction d’un plan ` a l’installation. Un plan est d´ e fini par trois fonctions de sous-points. La position du syst` e me de coordonn´ e es est la mˆ e me que la position du premier sous-point. L’axe z est l’ordonn´ e e du plan et l’axe y est dirig´...
-
Page 112: Configuration De Suivi Du Convoyeur
12.13 Configuration de suivi du convoyeur 12.13 Configuration de suivi du convoyeur Lors de l’utilisation d’un convoyeur, le robot peut ˆ e tre configur´ e de telle sorte qu’il suive le mouvement et la vitesse du convoyeur par rapport au point central de l’ou- til. -
Page 113: Installation Programme Par D´ E Faut
12.14 Installation Programme par d ´ efaut 12.14 Installation Programme par d ´ efaut Cet ´ e cran comporte les param` e tres visant ` a charger et d´ e marrer automatiquement un programme par d´ e faut, et ` a initialiser automatiquement le bras du robot au d´... -
Page 114: Initialisation Automatique
12.15 Onglet journal Ex´ e cuter programme ou d’appuyer sur le bouton Arrˆ e t du Tableau de bord permet de d´ e sactiver la fonction de d´ e marrage automatique jusqu’` a ce que le bouton Ex´ e cuter soit actionn´... -
Page 115: Ecran Chargement
12.16 ´ Ecran chargement Journal du robot La moiti´ e inf´ e rieure de l’´ e cran affiche des messages de journal. La premi` e re colonne cat´ e gorise la s´ e v´ e rit´ e de l’´ e l´ e ment du journal. La deuxi` e me co- lonne affiche l’heure d’arriv´... -
Page 116: Disposition De L' ´ Ecran
12.16 ´ Ecran chargement Disposition de l’ ´ ecran Cette image montre l’´ e cran de chargement r´ e el. Il est constitu´ e des zones et boutons importants suivants : Historique des trajectoires L’historique des trajectoires montre une liste de tra- jectoires conduisant ` a l’emplacement actuel. -
Page 117: Onglet Ex´ E Cution
12.17 Onglet Ex ´ ecution clavier ` a droite du champ. Cela provoque l’apparition d’un clavier ` a l’´ e cran o ` u l’utilisateur peut saisir le nom du fichier directement sur l’´ e cran. Bouton Ouvrir Un clic sur le bouton Ouvrir permet d’ouvrir le fichier actuelle- ment s´... - Page 118 12.17 Onglet Ex ´ ecution En outre, dans cet onglet, un programme par d´ e faut peut ˆ e tre automatiquement charg´ e et d´ e marr´ e sur la base d’une transition d’extr´ e mit´ e du signal d’entr´ e e ex- terne (voir 12.14).
-
Page 119: Programmation
13 Programmation 13.1 Nouveau programme Un nouveau programme de robot peut d´ e marrer soit ` a partir d’un mod` e le soit ` a partir d’un programme de robot existant (enregistr´ e ). Un mod` e le peut fournir la structure globale du programme de mani` e re ` a ne plus avoir qu’` a remplir les d´... -
Page 120: Onglet Programme
13.2 Onglet Programme 13.2 Onglet Programme L’onglet Programme montre le programme actuel en cours d’´ e dition. 13.2.1 Arborescence programme L’arborescence du programme du c ˆ ot´ e gauche de l’´ e cran affiche le programme comme une liste de commandes, tandis que la zone du c ˆ ot´ e droit de l’´ e cran affiche des infor- mations concernant la commande actuelle. -
Page 121: Indication D'ex´ E Cution Du Programme
13.2 Onglet Programme 13.2.2 Indication d’ex ´ ecution du programme L’arborescence du programme contient des rep` e res visuels fournissant des infor- mations au sujet de la commande actuellement ex´ e cut´ e e par le contr ˆ oleur du robot. Une petite ic ˆ... -
Page 122: Tableau De Bord Du Programme
13.3 Variables 13.2.4 Tableau de bord du programme La partie inf´ e rieure de l’´ e cran est le Tableau de bord. Le Tableau de bord comprend un ensemble de boutons similaires ` a ceux d’un magn´ e tophone d´ e mod´ e ` a partir desquels les programmes peuvent ˆ... -
Page 123: Commande : Vide
13.4 Commande : Vide Variables d’installation : Elles peuvent ˆ e tre utilis´ e es par de multiples programmes et leurs noms et valeurs sont conserv´ e s avec l’installation du robot (voir 12.10 pour plus d’informations) ; Variables de programme ordinaires : Elles sont disponibles pour le programme en cours d’ex´... -
Page 124: Commande : D´ E Placement
13.5 Commande : D ´ eplacement 13.5 Commande : D ´ eplacement La commande D´ e placement contr ˆ ole le mouvement du robot au cours des points de passage sous-jacents. Les points de passage doivent ˆ e tre sous une commande D´... - Page 125 13.5 Commande : D ´ eplacement pr´ e sentent un int´ e rˆ e t particulier. Les fonctions variables peuvent ˆ e tre utilis´ e es lorsqu’il est n´ e cessaire de d´ e terminer la position de l’outil sur un point de pas- sage par la valeur actuelle de la fonction variable lorsque le programme du robot est ex´...
- Page 126 13.5 Commande : D ´ eplacement Cruise Deceleration Acceleration Time 13.1 – Profil de vitesse d’un mouvement. La courbe est divis´ e e en trois segments : acc´ e l´ e ration, IGURE croisi` e re et d´ e c´ e l´ e ration. Le niveau de la phase croisi` e re est donn´ e par le r´ e glage de la vitesse du mouvement, tandis que la pente des phases acc´...
-
Page 127: Commande : Point De Passage Fixe
13.6 Commande : Point de passage fixe 13.6 Commande : Point de passage fixe Un point sur la trajectoire du robot. Les points de passage sont la partie la plus centrale d’un programme de robot qui indiquent au bras du robot o ` u se trouver. Un point de passage ` a position fixe est donn´... - Page 128 13.6 Commande : Point de passage fixe Note concernant la synchronisation d’E/S Si un point de passage correspond ` a un point d’arrˆ e t avec une commande d’E/S comme ´ e tant la commande suivante, la commande d’E/S est ex´ e cut´ e e lorsque le bras du robot s’arrˆ...
-
Page 129: Commande : Point De Passage Relatif
13.7 Commande : Point de passage relatif 13.7 Commande : Point de passage relatif Un point de passage avec la position donn´ e e par rapport ` a la position pr´ e c´ e dente du bras du robot, comme par exemple deux centim` e tres vers la gauche. La position relative est d´... -
Page 130: Commande : Point De Passage Variable
13.8 Commande : Point de passage variable 13.8 Commande : Point de passage variable Un point de passage avec une position d´ e finie par une variable, dans ce cas calculated pos. La variable doit ˆ e tre une pose telle que var=p[0.5,0.0,0.0,3.14,0.0,0.0]. -
Page 131: Commande : Attendre
13.9 Commande : Attendre 13.9 Commande : Attendre Attend un temps donn´ e ou un signal d’E/S. 13.10 Commande : R ´ egler R` e gle les sorties num´ e riques ou analogiques sur une valeur donn´ e e. Peut ´ e galement ˆ e tre utilis´ e pour r´ e gler la charge utile du bras du robot, par exemple le poids qui est ramass´... -
Page 132: Commande : Pop-Up
13.11 Commande : Pop-up afin d’empˆ e cher le robot de d´ e clencher un arrˆ e t de protection inattendu lorsque le poids au niveau de l’outil est diff´ e rent du poids attendu. Le TCP actif peut ´ e galement ˆ e tre modifi´ e ` a l’aide d’une commande R´ e gler. Il suffit de cocher la case et de s´... -
Page 133: Commande : Stop
13.12 Commande : Stop 13.12 Commande : Stop L’ex´ e cution du programme s’arrˆ e te ` a cet endroit. 13.13 Commande : Commentaire Permet au programmeur d’ajouter une ligne de texte au programme. Cette ligne de texte n’intervient pas au cours de l’ex´ e cution du programme. Version 3.1 (rev. -
Page 134: Commande : Dossier
13.15 Commande : Boucle 13.14 Commande : Dossier Un dossier est utilis´ e pour organiser et ´ e tiqueter des parties sp´ e cifiques d’un pro- gramme, nettoyer l’arborescence du programme et faciliter la lecture et la naviga- tion du programme. Un dossier n’intervient pas en lui-mˆ... -
Page 135: Commande : Sous-Programme
13.16 Commande : Sous-programme Met en boucle les commandes du programme sous-jacent. En fonction de la s´ e lection, les commandes du programme sous-jacent sont mises en boucle ` a l’infini, un cer- tain nombre de fois ou tant que la condition donn´ e e est vraie. En mettant en boucle un certain nombre de fois, une variable de boucle d´... -
Page 136: Commande : Affectation
13.17 Commande : Affectation Commande : Appeler sous-programme En appelant un sous-programme, les lignes de programme du sous-programme sont ex´ e cut´ e es apr` e s quoi le syst` e me retourne ` a la ligne suivante. 13.17 Commande : Affectation Affecte des valeurs ` a des variables. -
Page 137: Commande : Si
13.18 Commande : Si complexes. 13.18 Commande : Si Une construction si...autrement peut faire changer le comportement du robot bas´ e sur des entr´ e es de capteur ou valeurs variables. Utiliser l’´ e diteur d’expression pour d´ e crire la condition dans laquelle le robot doit proc´ e der aux sous-commandes de ce Si. -
Page 138: Commande : Script
13.19 Commande : Script 13.19 Commande : Script Cette commande permet d’acc´ e der au langage de script en temps r´ e el sous-jacent qui est ex´ e cut´ e par le contr ˆ oleur du robot. Elle est destin´ e e aux utilisateurs avanc´ e s uniquement et les instructions d’utilisation correspondantes peuvent ˆ... -
Page 139: Commande : ´ Ev´ E Nement
13.20 Commande : ´ Ev ´ enement 13.20 Commande : ´ Ev ´ enement Un ´ e v´ e nement peut ˆ e tre utilis´ e pour surveiller un signal d’entr´ e e et effectuer des actions ou r´ e gler une variable lorsque le signal d’entr´ e e devient trop ´ e lev´ e . Par exemple dans le cas o ` u un signal de sortie devient trop ´... -
Page 140: Commande : Thread
13.22 Commande : Mod ` ele 13.21 Commande : Thread Un thread est un processus parall` e le au programme du robot. Un thread peut ˆ e tre utilis´ e pour contr ˆ oler une machine externe ind´ e pendamment du bras robotique. Un thread peut communiquer avec le programme du robot avec des variables et signaux de sortie. - Page 141 13.22 Commande : Mod ` ele La commande Mod` e le peut servir ` a effectuer un cycle ` a travers les positions dans le programme du robot. La commande mod` e le correspond ` a une position dans chaque ex´ e cution. Un mod` e le peut ˆ...
-
Page 142: Commande : Force
13.23 Commande : Force Une variable de comptage est utilis´ e e en traversant les positions du mod` e le. Le nom de la variable s’affiche sur l’´ e cran de commande Mod` e le. La variable effectue un cycle ` a travers les nombres de 0 ` a X Y Z 1, le nombre de points du mod` e le. -
Page 143: S ´ Election De Fonction
13.23 Commande : Force S ´ election de fonction Le menu fonction sert ` a s´ e lectionner le syst` e me de coordonn´ e es (axes) utilis´ e par le robot quand il fonctionne en mode force. Les fonctions dans le menu correspondent ` a celles d´... -
Page 144: S ´ Election De Valeur De Force
13.23 Commande : Force du robot n’est pas en mouvement : en entrant en mode force avec le robot im- mobilis´ e , il n’y aura pas d’axe conforme avant que la vitesse du point central de l’outil soit sup´ e rieure ` a z´ e ro. Si, ult´ e rieurement, toujours en mode force, le bras du robot est ` a nouveau immobilis´... -
Page 145: Commande : Palette
13.24 Commande : Palette 13.24 Commande : Palette Une op´ e ration de palette peut effectuer une s´ e quence de mouvements dans un en- semble d’endroits donn´ e en tant que mod` e le, comme cela est d´ e crit au 13.22. ` A chacune des positions du mod` e le, la s´... -
Page 146: Commande : Rechercher
13.25 Commande : Rechercher Apr ` esFin La s´ e quence optionnelle AfterEnd est ex´ e cut´ e e lorsque l’op´ e ration est termin´ e e. Elle peut servir ` a signaler que le mouvement du convoyeur doit d´ e marrer en se pr´... - Page 147 13.25 Commande : Rechercher Empilage En empilant, le bras du robot se d´ e place vers le point de d´ e marrage puis se d´ e place dans la direction oppos´ e e pour chercher la position de pile suivante. Une fois la position trouv´...
- Page 148 13.25 Commande : Rechercher D ´ esempilage En d´ e sempilant, le bras du robot se d´ e place de la position de d´ e marrage dans la di- rection donn´ e e afin de rechercher l’article suivant. La condition ` a l’´ e cran d´ e termine ` a quel moment l’´...
-
Page 149: Expression Suivante De Position D'empilage
13.26 Commande : Suspendre Direction La direction est donn´ e e par deux positions et calcul´ e e comme la diff´ e rence de po- sition entre le point central de l’outil ` a la premi` e re position et celui ` a la deuxi` e me position. -
Page 150: Onglet Graphique
13.27 Onglet Graphique Ceci est une mani` e re rapide d’apporter des modifications ` a un programme sans d´ e truire le contenu original. 13.27 Onglet Graphique Repr´ e sentation graphique du programme de robot actuel. La trajectoire du point central de l’outil est montr´... -
Page 151: Onglet Structure
13.28 Onglet Structure Il est possible de faire un zoom et d’effectuer une rotation de la vue en 3D afin d’avoir une meilleure vue du bras du robot. Les boutons du c ˆ ot´ e sup´ e rieur droit de l’´... -
Page 152: Onglet Variables
13.29 Onglet Variables 13.29 Onglet Variables L’onglet Variables montre les valeurs en direct des variables dans le programme qui est ex´ e cut´ e et conserve une liste de variables et de valeurs entre les ex´ e cutions de programme. Il n’apparaˆ ı t que lorsqu’il a des informations ` a afficher. Les variables sont class´... -
Page 153: Commande : Initialisation Variables
13.30 Commande : Initialisation variables 13.30 Commande : Initialisation variables Cet ´ e cran permet de r´ e gler des valeurs de variables avant le d´ e marrage de l’ex´ e cution du programme (et d’´ e ventuels threads). S´ e lectionner une variable de la liste de variables en cliquant dessus ou en utilisant la boˆ... - Page 154 13.30 Commande : Initialisation variables II-78 Version 3.1 (rev. 18026)
-
Page 155: Ecran Configuration
´ Ecran configuration – Initialiser le robot Permet d’acc´ e der ` a l’´ e cran d’initialisation, voir 10.4. – Langue et unit´ e s Configurer la langue et les unit´ e s de mesures pour l’interface utilisateur, voir 14.1. –... -
Page 156: Langue Et Unit´ E S
14.1 Langue et unit ´ es 14.1 Langue et unit ´ es La langue et les unit´ e s utilis´ e es dans PolyScope peuvent ˆ e tre s´ e lectionn´ e es sur cet ´ e cran. La langue s´ e lectionn´ e e sera utilis´ e e pour le texte visible sur les divers ´ e crans de PolyScope ainsi que dans l’aide int´... -
Page 157: Mise ` A Jour Robot
14.2 Mise ` a jour robot 14.2 Mise ` a jour robot Les mises ` a jour de logiciels peuvent ˆ e tre install´ e es ` a partir de la m´ e moire flash USB. Ins´ e rer une cl´ e USB et cliquer sur Rechercher pour acc´ e der ` a la liste de son contenu. -
Page 158: R´ E Gler Le Mot De Passe
14.3 R ´ egler le mot de passe 14.3 R ´ egler le mot de passe Deux mots de passe sont pris en charge. Le premier est un mot de passe syst` e me en option qui empˆ e che toute modification non autoris´ e e de la configuration du robot. Lorsque le mot de passe syst` e me est r´... -
Page 159: Etalonner ´ Ecran
14.4 ´ Etalonner ´ ecran ´ Etalonner ´ ecran 14.4 ´ Etalonnage de l’´ e cran tactile. Suivre les instructions ` a l’´ e cran pour ´ e talonner l’´ e cran tactile. Utiliser de pr´ e f´ e rence un objet pointu non m´ e tallique comme par exemple un stylo avec capuchon. -
Page 160: R´ E Gler L'heure
14.6 R ´ egler l’heure Panneau de configuration du r´ e seau Ethernet. Une connexion Ethernet n’´ e tant pas n´ e cessaire pour les fonctions de base du robot, elle est d´ e sactiv´ e e par d´ e faut. 14.6 R ´... - Page 161 15 Configuration de s ´ ecurit ´ e Le robot est ´ e quip´ e d’un syst` e me de s´ e curit´ e avanc´ e . Selon les caract´ e ristiques par- ticuli` e res de son espace de travail, les param` e tres du syst` e me de s´ e curit´ e doivent ˆ...
-
Page 162: Modifier La Configuration De S´ E Curit´ E
15.2 Synchronisation de s ´ ecurit ´ e et erreurs – Le sous-onglet Limites g´ e n´ e rales d´ e finit la force, la puissance, la vitesse et l’impulsion maximales du bras du robot. Lorsque le risque de heurter un hu- main ou d’entrer en collision avec une partie de son environnement est parti- culi` e rement ´... -
Page 163: Tol´ E Rances
15.3 Tol ´ erances sur le c ˆ ot´ e gauche de l’´ e cran. Ces ic ˆ ones fournissent une indication rapide de l’´ e tat actuel. Elles sont d´ e finies ci-dessous : Configuration synchronis´ e e : Montre que l’installation de la GUI est identique ` a la configuration de s´... -
Page 164: Somme De Contr ˆ Ole De S´ E Curit´ E
15.5 Modes de s ´ ecurit ´ e proximit´ e d’une limite, par exemple un robot peut ne pas obtenir la vitesse maxi- male exacte sp´ e cifi´ e e par une limite de vitesse d’articulation ou la limite de vitesse du TCP. -
Page 165: Mode Fonctionnement Libre
15.6 Mode fonctionnement libre et le mode R´ e duit. Pour l’outil et les articulations, les limites du mode R´ e duit concer- nant la vitesse et l’impulsion sont n´ e cessaires pour ˆ e tre plus restrictives que leurs homologues du mode Normal. -
Page 166: Limites G´ E N´ E Rales
15.9 Limites g ´ en ´ erales s´ e curit´ e doit ˆ e tre appliqu´ e e ou annul´ e e avant de quitter l’onglet Installation. Ces modifications n’entrent pas en vigueur tant que l’on n’a pas appuy´ e sur le bouton Appliquer et que la confirmation n’a pas ´... - Page 167 15.9 Limites g ´ en ´ erales Deux moyens sont disponibles pour configurer les limites de s´ e curit´ e g´ e n´ e rales au sein de l’installation : les Param` e tres de base et les Param` e tres avanc´ e s qui sont d´ e crits plus en d´...
- Page 168 15.9 Limites g ´ en ´ erales Ici, chacune des limites g´ e n´ e rales d´ e crites dans 15.9 peut ˆ e tre modifi´ e e ind´ e pendamment des autres. Ceci s’effectue en tapant sur le champ textuel et en saisissant la nouvelle valeur.
-
Page 169: Limites D'articulation
15.10 Limites d’articulation par la perte de valeurs personnalis´ e es, une boˆ ı te de dialogue pop-up s’ouvre pour confirmer l’action. 15.10 Limites d’articulation Les limites d’articulation restreignent le mouvement des articulations individuelles dans l’espace d’articulation, c’est-` a -dire qu’elles ne se r´ e f` e rent pas ` a l’espace cart´ e sien mais plut ˆ... -
Page 170: Limites
15.11 Limites La tol´ e rance et l’unit´ e pour chaque limite sont r´ e pertori´ e es ` a la fin de la ligne qui lui correspond. Lorsqu’un programme est en cours d’ex´ e cution, la vitesse du bras du robot est automatiquement ajust´... -
Page 171: S´ E Lectionner Une Limite ` A Configurer
15.11 Limites La configuration de chaque limite repose sur l’une des caract´ e ristiques d´ e finies dans l’installation actuelle du robot (voir 12.12). REMARQUE: Il est vivement recommand´ e de cr´ e er toutes les fonctions n´ e cessaires pour la configuration de toutes les limites souhait´ e es et de leur affecter des noms appropri´... -
Page 172: Configuration Du Plan De S´ E Curit´ E
15.11 Limites Les plans de s´ e curit´ e (actifs) sont illustr´ e s en jaune et noir avec une petite fl` e che repr´ e sentant le plan normal, qui indique le c ˆ ot´ e du plan sur lequel le point central de l’outil du robot peut ˆ... - Page 173 15.11 Limites et type de plan sont disponibles. Le choix de l’´ e l´ e ment <Undefined> supprime la configuration du plan. L’axe z de la fonction s´ e lectionn´ e e pointera vers la zone interdite et la normale du plan pointera dans la direction oppos´...
- Page 174 15.11 Limites D ´ eplacement Lorsqu’une fonction a ´ e t´ e s´ e lectionn´ e e dans la case d´ e roulante de la partie inf´ e rieure gauche du panneau Propri´ e t´ e s du plan de s´ e curit´ e , le plan de s´...
-
Page 175: Configuration De La Limite De L'outil
15.11 Limites central de l’outil du robot passe par le plan du mode de d´ e clenchement r´ e duit, la plus permissive des limites du mode Normal et R´ e duit est appliqu´ e e pour chaque valeur de limite. Une fois que le point central de l’outil du robot est positionn´ e ` a 20 mm ou plus du plan du mode de d´... - Page 176 15.11 Limites s´ e lectionn´ e e sera utilis´ e comme vecteur d’orientation de l’outil d´ e sir´ e pour cette li- mite. Utiliser la case d´ e roulante de la partie inf´ e rieure gauche du panneau Propri´ e t´ e s des limites de l’outil pour s´...
-
Page 177: E/S De S´ E Curit´ E
15.12 E/S de s ´ ecurit ´ e 15.12 E/S de s ´ ecurit ´ e Cet ´ e cran d´ e finit les Fonctions de s´ e curit´ e pour les entr´ e es et les sorties (E/S) confi- gurables. - Page 178 15.12 E/S de s ´ ecurit ´ e ´ e galement provoquer un passage en mode R´ e duit (voir 15.11.3 pour plus d’infor- mations). – R´ e initialisation de protection : Si l’Arrˆ e t de protection est cˆ a bl´ e dans les E/S de s´...
-
Page 179: Glossaire
Glossaire Arrˆ e t de cat´ e gorie 0 : Le mouvement du robot est arrˆ e t´ e par la mise hors tension imm´ e diate du robot. Il s’agit d’un arrˆ e t non contr ˆ ol´ e , o ` u le robot peut s’´ e carter de la trajectoire programm´... - Page 180 15.12 E/S de s ´ ecurit ´ e II-104 Version 3.1 (rev. 18026)
- Page 181 Index Version 3.1 (rev. 18026) II-105...