Electro-Voice IRIS Net RCM-26 Mode D'emploi
Les langues disponibles
Les langues disponibles
Chapitres

Manuels Connexes pour Electro-Voice IRIS Net RCM-26

Sommaire des Matières pour Electro-Voice IRIS Net RCM-26
- Page 1 OWNER’S MANUAL BEDIENUNGSANLEITUNG MODE D’EMPLOI RCM-26 Remote Control Module...
-
Page 23: Remote Control Module
BEDIENUNGSANLEITUNG RCM-26 Remote Control Module... - Page 45 MODE D’EMPLOI RCM-26 Remote Control Module...
- Page 46 MATIÈRES Introduction ..........49 Description du système .
-
Page 47: Important Safety Instructions
IMPORTANT SAFETY INSTRUCTIONS Le symbole „éclair“ à l’intérieur d’un triangle signale à l’utilisateur la présence dans l’appareil de câbles et de contacts qui ne sont pas isolés, dans lesquels circule un courant électrique à haute tension, et qu’on ne doit en aucun cas toucher afin d’éviter de recevoir une décharge électrique qui pourrait être mortelle Le symbole „point d’exclamation“... -
Page 48: Instructions De Réparation Importantes
INSTRUCTIONS DE RÉPARATION IMPORTANTES ATTENTION: Ces instructions de maintenance s’adressent uniquement à des techniciens qualifiés. Pour réduire le risque d’électrocution, n’effectuez aucune opération de maintenance autre que celles contenues dans les instructions d’utilisation, à moins d’être qualifié pour le faire. Confiez toutes ces interventions à un personnel qualifié. -
Page 49: Introduction
1 Introduction 1.1 Description du système Le Module de Télécommande RCM-26 est un contrôleur numérique à deux voies destiné à la sonorisation d’événements «en live», de lieux publics et d’installations fixes. Ce module peut être utilisé dans divers amplis Electro- Voice®... -
Page 50: Déballage Et Garantie
des haut-parleurs sont disponibles afin d’optimiser les amplificateurs et les haut- parleurs. Tous les réglages de DSP peuvent être entièrement édités et mémorisés dans des préréglages (presets) utilisateurs directement sur le module. En cas de panne du réseau ou de coupure de courant, tous les réglages (filtres, délai, niveau, etc.) restent intacts, indépendants du contrôle par le réseau. -
Page 51: Remarques Sur L'installation
1.3 Remarques sur l’installation 1. Éteignez l’ampli de puissance et débranchez-le du secteur. 2. Enlevez le panneau arrière (4 vis) 3. Insérez le module RCM-26 dans le slot et vissez-le sur le panneau arrière à l’aide des 4 vis (voir l’illustration 1.1) Illustration 1.1: Installation d’un module RCM-26 4. -
Page 52: Iris-Net
La conversion s'effectue en changeant la position des cavaliers JP1 à JP5 sur la RCM-26. Les photos suivantes montrent la position des cavaliers des modes " Pré-atténuateur " et " Post-atténuateur ". Seules les positions indiquées sont autorisées. Illustration 1.2: Mode pré-atténuateur (gauche) au mode post-atténuateur (droite) Note: Sur les RCM-26 fabriquées en 2006 il n'y a pas de cavaliers JP1 à... - Page 53 Les illustrations suivantes montrent un exemple d’amplificateur de puissance dans IRIS-Net™ et le synoptique DSP d’un module RCM-26. Illustration 1.3: Amplificateur de puissance avec Contrôles Utilisateur Illustration 1.4: Schéma de principe DSP du module RCM-26 RCM-26 Remote Control Module Mode d’emploi...
-
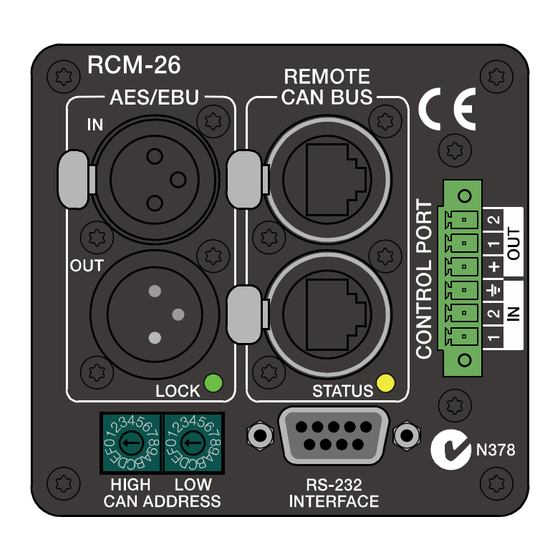
Page 54: Commandes Et Connexions
2 Commandes et connexions 1, AES/EBU-IN Une entrée numérique AES/EBU (AES3) est fournie en plus des entrées analogiques internes. Le signal d’entrée numérique doit être relié au connecteur AES/EBU IN. L’entrée AES/EBU est isolée par un transformateur symétrisé. Un convertisseur de fréquence d’échantillonnage convertit le signal d’entrée pour qu’il corresponde à... -
Page 55: 2, Aes/Ebu-Out
externe existe aussi. Pour les détails, veuillez vous reporter aux fichiers d’aide IRIS-Net™. L’illustration suivante représente le câblage de la prise d’entrée. Illustration 2.1: Câblage de la prise AES/EBU-IN 2, AES/EBU-OUT Le connecteur AES/EBU OUT permet de transmettre le signal audio numérique à... -
Page 56: 3, Témoin Lock
3, Témoin LOCK Le témoin à LED “LOCK” s’allume en vert dès que l’entrée AES/ EBU s’est synchronisée au signal reçu et qu’une transmission audio est établie. Le témoin LOCK s’éteint quand aucun signal audio numérique n’est présent à l’entrée ou lorsque le PLL interne n’est pas verrouillé... - Page 57 Débit (en kbit/s) Longueur (en m) 62,5 1000 2500 5000 Tableau 1 : Débit et longueur du bus Illustration 2.3: Câblage de la prise CAN Illustration 2.4: Câblage de la prise CAN Fiche Couleur T568A T568B CAN_GND Vert Orange CAN_H (+) Bleu CAN_L (-) Rayé...
-
Page 58: 5, Témoin Status
5, Témoin STATUS Le témoin à LED “STATUS” sert à surveiller la communication sur le bus CAN. La LED clignote en rythme toutes les 3 secondes, lorsque l’adresse du module est réglée sur “00“, ce qui signifie qu’il est déconnecté du bus CAN et donc du contrôle logiciel. La LED clignote en rythme toutes les secondes, lorsqu’une adresse comprise entre 01 et 250 a été... - Page 59 HIGH Adresse Indépendant 1...F 1...15 0...F 16...31 0...F 32...47 0...F 48...63 0...F 64...79 0...F 80...95 0...F 96...111 0...F 112...127 0...F 128...143 0...F 144...159 0...F 160...175 0...F 176...191 0...F 192...207 0...F 208...223 0...F 224...239 0...A 240...250 B...F réservé Tableau 3 : Adresses CAN L’adresse 0 (00 hex, état à...
-
Page 60: 7, Port De Controle
7, PORT DE CONTROLE Le CONTROL PORT du RCM-26 fournit deux entrées de contrôle, deux sorties de contrôle et des connexions de référence pour le +5V et la terre. Les entrées de contrôle sont configurables via IRIS- Net™. Elles peuvent par exemple servir à passer du mode sous tension à... - Page 61 RS-232 servant à relier le RCM-26 à un autre appareil ne doit pas dépasser 15 mètres. Illustration 2.5: Câblage de l’Interface RS-232 Le tableau suivant montre les réglages d’usine de l’interface RS-232 du module RCM-26. L’appareil connecté (ex. un PC avec un logiciel de contrôle multi- media) doit être configuré...
-
Page 62: Principes Du Bus Can
3 Principes du Bus CAN La topologie réseau utilisée par le bus CAN est basée sur une "topologie de chaîne ou de ligne", c'est-à-dire que tous les participants sont connectés via un seul câble à deux fils (paire torsadée, blindée ou pas), le câblage allant d'un participant au suivant sur le bus (ou chaîne), ce qui permet une communication illimitée entre les appareils. - Page 63 En employant un répétiteur de bus CAN une connexion entre deux systèmes de bus CAN indépendants peut être créée. Il est alors possible de: • Augmenter le nombre maximum de membres Un maximum de 100 appareils peuvent être connectés à un même bus CAN.
-
Page 64: Exemples De Systèmes
Exemples de systèmes Les illustrations suivantes montrent des exemples de câblage de type bus de données pour différentes tailles de réseau CAN. Illustration 3.2: Système avec 5 amplis de puissance et un UCC-1 au début de la chaîne (bus). Bouchons de terminaison sur le UCC-1 (première unité du bus) et sur l'ampli 5 (dernière unité... -
Page 65: Caractéristiques Des Performances
Illustration 3.3: Système avec avec 2 amplis en rack et un UCC-1 au milieu. Bou- chons de terminaison sur l'ampli de puissance 6 (première unité du bus) et sur l'ampli de puissance 12 (dernière unité du bus) Caractéristiques des Performances Selon le standard ISO 11898-2, le câblage pour transfert de données du bus CAN doit être réalisé... - Page 66 bus. Le tableau suivant montre les exigences les plus essentielles pour les réseaux CAN composés d'un maximum de 64 participants. Câble de Transmission de données Longueur du- Terminaison Vitesse de Résistance par Diamètre du câble (en Ω) Bus (en m) Transfert Max.
- Page 67 seule portion de câble ne doit pas dépasser 2 mètres. Pour des débits plus élevés une longueur maximum de seulement 0.3 mètre est permisse. La longueur totale de toutes les lignes de raccordement ne doit pas dépasser 30 mètres. Remarque générale: •...
-
Page 72: Dimensions / Abmessungen
4.3 Dimensions / Abmessungen RCM-26 Remote Control Module... - Page 73 RCM-26 Remote Control Module...
- Page 74 Notes...
- Page 75 Notes...