
Manuels Connexes pour Simrad AP24















Sommaire des Matières pour Simrad AP24
- Page 1 Manuel Simrad AP24 Pilote Automatique Français Sw.1.3 www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics...
- Page 3 à tout moment des modifications à nos produits et à notre documen- tation. Des manuels mis à jour sont disponibles sur notre site internet www.simrad-yachting.com, et leur charge- ment est gratuit. © Copyright 2010 by Navico Holding AS.
- Page 4 AP24. Dans ce manuel, les noms des commandes de menus, textes des boîtes de dialogue et touches sont en caractères gras (ex.
- Page 5 1.4 Mode Standby (Veille)......10 1.5 Pilotage automatique ......12 1.6 Mode “Sans Dérive”(NoDrift) ....30 1.7 AP24 et positionneur ......31 1.8 Mode conservateur d’allure (voiliers) .... 35 1.9 Conservateur d’allure et navigation (voiliers)39 1.10 Pages de données ........ 42 1.11 Système multi-stations ......
- Page 6 6.7 Changement de logiciel ......112 7 Equipement en option ......113 7.1 Télécommande R3000X (NFU) ....113 7.2 Manette S35 (NFU)....... 114 7.3 JS10 Joystick (NFU)......114 7.4 AP24 avec MSD50 ........ 114 8 Glossaire..........117 4 | Manuel AP24...
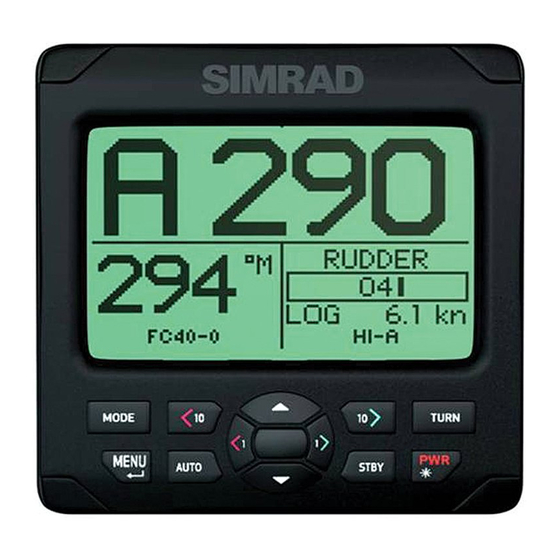
- Page 7 à proximité du compas du pilote • Procédez régulièrement à des relèvements précis et au calcul de la position du navire • Passez toujours à temps en mode Veille pour éviter les situations dangereuses 1.1 Vue d’ensemble Figure 1-1 Face avant AP24 Fonctionnement | 5...
- Page 8 Touche Description Marche-Arrêt / touche lumineuse Touche standby STBY Active le mode standby Touche auto AUTO Active le mode auto Touche mode MODE Active le mode touches symboles Fonction activée selon la touche symbole sélectionnée Touche giration TURN Pour entrer dans le sous-menu virement Virement ou empannage en mode vent Fonction activée selon la touche symbole sélectionnée Touche Menu/Entrée...
- Page 9 Touche haut Monte dans le menu ou la rubrique, Augmente Touche bas Descend dans le menu ou la rubrique, Diminue Touches symboles Quand la fonction de base de la touche est changée, une touche symbole s’affiche juste au-dessus pour indiquer la fonction de remplacement.
- Page 10 être transférée d’une unité à une autre en Cependant, vous pressant n’importe quelle touche mode. pouvez changer de cap directement sur une unité inactive. Les unités AP24 qui ne sont pas sous contrôle afficheront l’icône Fonctionnement avançée Pour plus d’informations, reportez-vous à la rubrique Setup (réglage) dans le menu principal page 48 for...
- Page 11 1.2 MARCHE/ARRET A la première mise en service voir page 63. Une unique pression sur la touche PWR met le système de pilote automatique en marche et présente les pages de démarrage suivantes : • Nom du produit • Numéro de série •...
- Page 12 1.3 Rétro-éclairage Il peut être réglé à tout moment. Pressez la touche PWR La fenêtre de niveau d’éclairage s’ouvrira en superposition en haut de l’affichage en cours Appuyez sur l’une des touches pour changer le rétro-éclairage de l’écran selon le mode suivant: La touche PWR pour augmenter par pas le niveau d’éclairage La touche affichée +/- pour augmenter/...
- Page 13 NFU ou des télécommandes. Affichage alternatif en mode standby Alternance de l’angle de barre Si votre pilote Simrad comprend une unité de puissance MSD50, l’angle de barre affiché à la mise en marche du pilote automatique alterne entre 10°...
- Page 14 • Paramètres de barre: LO-A (Bas automatique) L’AP24 maintient le bateau sur le cap programmé jusqu’à ce que vous sélectionniez un nouveau mode ou que vous pro- grammiez un nouveau cap à l’aide des touches suivantes. Réglage...
- Page 15 Installation/Commissioning/Reglage en Mer, page 82. Voir le diagramme page suivante. Pour des raisons de sécurité l’AP24 pilote avec le jeu de paramètres LO quand il ne dispose pas d’information de vitesse ou si la vitesse est nulle au moment de l’activation, à...
- Page 16 Vitesse Transition vers paramètres LO à l'accélération : 10 nœuds Vitesse de Transition réglée à 9 nœuds Transition vers paramètres HI au ralentissement : 8 nœuds Signification des affichages HI-A Paramètres de réponse hauts sélectionnés automatiquement LO-A Paramètres de réponse bas sélectionnés automatiquement HI-M Paramètres de réponse hauts sélectionnés...
- Page 17 Voir aussi Sensibilité vent (voiliers) page 16. Ajustement de la sensibilité Le perfectionnement de la fonction Autotune de l’AP24 est telle que la majorité des bateaux ne nécessiteront pas d’ajustement des paramètres de pilotage. Sur quelques bateaux, cependant, ou dans des conditions de mer particulières, un réglage fin de ces paramètres pourra...
- Page 18 Les valeurs HI et LO peuvent être ajustées même lorsque le bateau est hors de l’eau. Amplitude Change par pas de Valeur par défaut Sensibilité vent (voiliers) Vérifiez que la différence entre la Route à Suivre (CTS) et le cap actuel est à un minimum acceptable. Si la différence entre l’angle du vent programmé...
- Page 19 Le paramètre en cours et son réglage sont affichés en sous-titre sur l’écran. Modes de giration (bateaux à moteur) L’AP24 permet de sélectionner différents modes de giration en mode AUTO. La giration débute 1 minute après que le mode de sélection ait été choisi. Dans l’intervalle de temps le pilote automatique maintient le...
- Page 20 Demi-tour (U-Turn) Le demi-tour change de 180° le cap programmé, orientant ainsi le bateau dans la direction strictement opposée. Ce mode de giration s’avère particulièrement utile en cas d’homme à la mer et lorsque vous souhaitez faire une route opposée à 180°. TURN Pressez la touche pour choisir le sens du demi-...
- Page 21 Pressez la touche pour sélectionner et enclencher la rotation dans le sens choisi. L’angle de giration (ROT) peut être paramétré avant d’enclencher la fonction ou durant l’opération. En augmentant le taux de giration, vous réduisez le rayon du cercle et vice versa. Paramètre Change Amplitude...
- Page 22 Rotation en spirale La rotation en spirale peut être aussi très utile en pêche ou pour la récupération d’un objet. Elle pilote le bateau sur un parcours en spirales à spires plus ou moins écartées par augmentation ou réduction du taux de giration.
- Page 23 Les valeurs négatives indiquent une rotation en spirale qui diminue alors que les valeurs positives indiquent une rotation en spirale qui augmente. Augmentation Diminution Paramètre Change Amplitude de rotation par pas défaut 33 pds - 3281 pds 656 pds Rayon initial 10 m - 1000 m 200 m Change de...
- Page 24 Route en zigzags Accès au mode zigzag: TURN L’amplitude de changement de cap (2-70°) peut être réglée avant d’enclencher la fonction. Pressez la touche pour sélectionner et enclencher le premier changement de cap dans le sens choisi. L’amplitude des changements de cap ainsi que la distance entre les changements de cap peuvent être modifiées en cours de navigation.
- Page 25 Changement de cap 20° Cap moyen Durée de l’étape Changement de cap 40° Paramètre de Change Amplitude rotation par pas défaut Changement de 4° - 140° 28° 82 pds- 9843 pds 1641 pds Durée de l’étape 25 m - 3000 m 500 m L’unité...
- Page 26 Le cap initial peut être changé à tout moment. Vous pouvez également changer à tout moment la longueur de chaque bord jusqu’au prochain changement de cap à 90°. Paramètre de Change Amplitude rotation par pas défaut 82 pds- 9843 pds 1641 pds Durée de 500 m...
- Page 27 L’amplitude de changement de cap (2-80°) peut être réglée avant d’enclencher la fonction. Pressez la touche pour sélectionner et enclen- cher le premier changement de cap dans le sens choisi. Tous les paramètres, cap principal, fréquence de changement de cap et amplitude de virement, peuvent être modifiés en cours d’utilisation de la fonction.
- Page 28 Repérage des lignes de sonde DCT A partir des données en provenance d’un sondeur à ultrasons, le pilote automatique peut être réglé pour conduire le bateau au-dessus d’un fond pré-déterminé. Cette fonction est très pratique si vous souhaitez suivre une ligne de sonde. Assurez-vous, au préalable, que le système comprend un lecteur de profondeur en état de fonctionnement.
- Page 29 TURN L’écran affiche la profondeur actuelle. Dirigez le bateau vers la profondeur que vous souhaitez atteindre et en direction de la ligne de sonde (route principale). Quand la profondeur voulue est atteinte, activez le repérage des lignes de sonde avec la touche ou la touche .
- Page 30 Utilisez le gain pour avoir une réponse plus ou moins marquée à la variation de profondeur. Contour de l’angle traversier (CCA) Avec ce paramètre le bateau peut faire une route en lacets qui passe au-dessus de la profondeur de référence. Quand le CCA est sur zéro il n’y a pas de lacet.
- Page 31 Change Paramètre de rotation Amplitude par pas défaut Route principale 0° - 359° – Gain de la profondeur 5 - 95 Contour de l’angle 0 - 50 traversier Profondeur de référence La profondeur de référence est saisie quand le DCT activé.
- Page 32 TURN Uniquement pour les voiliers Le bateau vire sur tribord 1.6 Mode “Sans Dérive”(NoDrift) Le mode NoDrift est une alternative au mode NAV, qui est automatiquement activé en appuyant sur la touche MODE puis sur la touche La source de données en mode NoDrift est la source Position (Pos).
- Page 33 Si l’AP24 est connecté à un positionneur qui ne transmet pas de message indiquant le point de relèvement suivant, il utilise uniquement le message XTE (écart traversier) pour piloter.
- Page 34 Position (GPS,Traceur de cartes) voir page 52. Ce mode de fonctionnement ne doit être utilisé qu'en eaux libres. Quand vous sélectionnez le mode NAV, l'AP24 est programmé pour le pilotage automatique sur le cap de consigne actif puis attend que l'utilisateur valide le changement de cap vers la ligne de route ou le point de route de destination.
- Page 35 2 décimales. En mode NAV, pour parcourir une route composée de plusieurs points de route, l'AP24 dirige le bateau vers le premier point. Une fois ce point rallié, l'AP24 déclenche une alarme, affiche les données du nouveau cap à suivre pour atteindre le point suivant et change automatiquement de cap pour faire route vers ce nouveau point de route.
- Page 36 Cercle d’arrivée au point de route En pilotage sous mode NAV, il est recommandé de programmer une distance d'arrivée à partir de laquelle le bateau commence à changer de cap pour se diriger vers le nouveau point de route. Le cercle d'arrivée doit être réglé en fonction de la vitesse du bateau.
- Page 37 Installation et si la source NAV WIND est réglée sur WIND dans le menu Paramétrage Utilisateur. Avant d'accéder au mode WIND, l'AP24 doit être en mode AUTO et recevoir en entrée une donnée valide en provenance d’une girouette anémomètre.
- Page 38 sur cette valeur pour modifier le cap de sorte à conserver un angle de vent constant. L'alarme WIND SHIFT retentit si le cumul des change- ments de direction du vent, depuis la programmation d'un nouvel angle de vent, excède la limite préréglée. Les ajustements de l’angle du vent se font comme suit : Bâbord par Bâbord par...
- Page 39 TURN Virement et empannage L’empannage est possible quand l’angle du vent vrai est supérieur à 120°. TURN La vitesse de rotation du bateau au moment de l’empannage proprement dit est la plus rapide possible en fonction des performances de l’unité de puissance. Fonctionnement | 37...
- Page 40 Prévention des virements et empannages intempestifs Les allures de près ou de vent arrière sont les plus critiques sous pilote. En cas de mauvais réglage des voiles, le bateau peut partir au lof sous l’effet combiné des vagues et du vent. Si l’angle de vent minimum choisi est dépassé...
- Page 41 1.9 Conservateur d’allure et navigation (voiliers) Le pilote automatique peut également barrer le bateau à partir des données de vent et de navigation en provenance d'un GPS ou d'un traceur de cartes. Ce mode, appelé WIND combine plusieurs critères (voir page suivante). Pour l’activer, appuyez sur la touche MODE une fois en mode Wind [1] puis sur la touche .
- Page 42 Mode WIND NAV Figure 1-2 Voir exemple de voilier en mode Wind pour faire la route la plus efficace vers le point de route WP1. 1. Le pilote automatique est toujours en mode Wind en s’approchant de la marque 2 et le point de route WP1 a été...
- Page 43 Figure 1-2 Fonctionnement | 41...
- Page 44 1.10 Pages de données Il est possible d’afficher des pages de données si celles-ci sont disponibles sur SimNet (voir page 103). Quand l’une des pages du menu principal est affichée, parcourez et faites défilez les pages de données en pressant les touches En Haut /En Bas. En accédant aux pages de données, la page qui s’affichera en premier sera la dernière page de données active.
- Page 45 Pages de données disponibles Ecran principal 1.11 Système multi-stations En fonctionnement normal dans un système multi- stations les commandes sont accessibles depuis tout pupitre de commande connecté à l’AP 24. Un pupitre de commande est "actif" et permet à l’utilisateur d’accéder à toutes les fonctions.
- Page 46 Page blanche 44 | Fonctionnement...
- Page 47 2 Menu Principal Le Menu Principal vous informe sur l’installation et le réglage du pilote. L’accès au mode Demo se fait avec le Menu Service. Menu Principal | 45...
- Page 48 Une pression sur la touche MENU active le Menu Principal dont les rubriques donnent accès à des sous-menus et à différents réglages. Les valeurs de réglage sont habituellement présentées dans la colonne droite de la fenêtre, mais peuvent également s’afficher dans une fenêtre en superposition. Réglages de la langue Valeurs de réglages présentées dans un fenêtre...
- Page 49 2.1 Choix des pages de données Toutes les pages de données sont disponibles par défaut. Voir page 43. Si vous le souhaitez vous pouvez réduire le nombre de pages. Pages indisponibles Continuez à sélectionner les pages et répétez l’opération si d’autres pages sont à supprimer. Maintenez pressée la touche Gauche1 pour quitter le menu et revenir à...
- Page 50 Rendre toutes les pages disponibles Pour restaurer toutes les pages indisponibles, sélectionnez Restor. Pages Donnees: 2.2 Distance trajet (loch totaliseur) L’affichage loch totaliseur indique: a. distance totale accumulée depuis l’installation de l’instrument ou sa remise à zero en usine b. distance écoulé depuis la mise en service/la remise à...
- Page 51 Sélection des unités de mesure Ajustement du filtre état de la mer Changement des paramètres de navigation sous voile Dans cette section l’utilisateur est supposé être familiarisé avec l’utilisation des touches et les déplacements dans les menus. Dans le cas contraire, reportez-vous au chapitre Menu Principal, page 45.
- Page 52 Vitesse Bateau Vent Apparent Variation Vent Prof. Alarmes L’AP24 peut être réglé pour qu’une alarme se déclenche si le bateau ou des paramètres environnementaux excédent des valeurs préréglées. En réglant la valeur sur Off la surveillance alarme est désactivée. 50 | Menu Principal...
- Page 53 Hauts-fonds Le réglage de l’alarme est global et peut se faire sur n’importe quel équipement Simrad sur lequel cette fonction est installée. Amplitude Change par pas de Par défaut Unités Off – 320 pds 1.6–5: 0.1 pd pd, m 5–10: 0.5 pd...
- Page 54 Réglage des sources de données La source de données peut être un capteur ou un autre appareil Simrad connecté à SimNet qui fournit des don- nées à d’autres instruments SimNet. Ces données peuvent être des données de compas, de vent apparent, de vent calculé, de profondeur, etc.
- Page 55 La mise à jour permet de s’assurer que la sélection de source existante est valide et maintenue. Les sources manquantes sont automatiquement échangées contre une autre source figurant dans la liste des sources disponibles pour un type donné d’information, ou remplacées par une source qui est sélectionnée.
- Page 56 Entrez dans le menu étalonnage et compensation. (Cf. Installation/Calibration). Pour afficher la liste des sources disponibles pour un certain type de données 54 | Menu Principal...
- Page 57 Affichage Deux modes utilisateurs ajustables individuellement sont disponibles pour les réglages écran. Il y a un Mode Jour et un Mode Nuit. Les configurations peuvent être optimisées pour une bonne lisibilité dans différentes conditions d’éclairage, et vous pouvez rapidement passer de l’une à l’autre avec la touche PWR et la touche .
- Page 58 Sélection de la langue La langue se sélectionne à la première mise en marche de l’instrument. Voir Première mise en marche, page Elle peut cependant être changée à tout moment. La sélection possible est la suivante: • Deutch (Allemand) • English (Anglais) •...
- Page 59 Unités de mesure Paramètre Options défaut Vitesse du bateau − kn − km/h − mph Vitesse du vent − kn − m/s − mph Distance − nm − km − mi Profondeur − m − ft − °M °M − °T Température −...
- Page 60 Filtre d’état de la mer Le Filtre d’état de la mer sert à réduire l’activité de la barre et la sensibilité du pilote automatique par gros temps. Arrêt: Le Filtre d’état de la mer est désactivé. Réglage par défaut. AUTO: Réduit l’activité...
- Page 61 Duree Virement Quand vous effectuez un virement en mode WIND, le taux de giration (Durée Virement) peut être réglé. Cela laisse aux barreurs en solitaire du temps pour manœuvrer le bateau et les voiles pendant le virement. Un virement effectué sans changement d’amure, peut également se faire en contrôlant le taux de rotation.
- Page 62 Pour une navigation en eaux fermées, l’angle du vent apparent peut temporairement changer quand le vent souffle en rafales. Il est donc préférable de naviguer en vent vrai; sélectionnez ‘Vrai’. Amplitude Valeur par défaut Auto – Apparent - Vrai Auto Optimisation du VMG Une fois activée l’optimisation du VMG est active de 5 à...
- Page 63 2.4 Verrouillage Le verrouillage "Lock" est une fonction de sécurité du pilote automatique AP24. Elle désactive tous les pupitres de commande. Le transfert des commandes est impossible quand le verrouillage est activé; seul le pupitre “actif” reste opérationnel. Procédez comme suit pour activer la fonction “Lock”: L’écran de pupitre de commande “actif”...
- Page 64 Page blanche 62 | Menu Principal...
- Page 65 AP24 conformément aux instructions d’installation avant de le mettre en marche et d’effectuer le paramétrage d’installation. A la première mise en marche de l’AP24 l’écran d’accueil affiche les données suivantes: Nom du produit, numéro de série, version logiciel, date d’édition Sélection de la langue...
- Page 66 3.2 Menu Installation Les réglages d’installation doivent être effectués comme éléments de la procédure d’installation du système AP24. Toute négligence dans l’application de cette procédure peut compromettre le bon fonctionnement de l’AP24! Le menu Installation est accessible uniquement en mode STBY.
- Page 67 d’interfaçage (voir page 63) et il faut effectuer un paramétrage complet. • Les réglages effectués lors de la procédure de réglage en mer dépendent de l’exécution avec succès de la procédure de réglage à quai. Commissioning Réglages à quai Si le pilote n’est pas équipé de feedback de barre reportez-vous au feedback virtuel pages 74 à...
- Page 68 Type de bateau Cette sélection affecte les paramètres de barre et les fonctions disponibles via le pilote automatique. Options possibles: Coque planante, Déplacement, Voile et Hors-bord. La sélection du type de bateau se fait à l’aide des touches Haut et Bas. Confirmez en pressant la touche Etalonnage de l’Emetteur d’angle de barre Non applicable en mode EVC...
- Page 69 Si l’angle de barre réel est différent de celui affiché à l’écran, corrigez l’affichage à l’aide des touches Haut/Bas (Voir remarque). MENU Confirmez l’étalonnage de l’émetteur d’angle de barre à tribord en pressant la touche MENU. Tournez manuelle- ment la barre/le safran vers bâbord jusqu’à...
- Page 70 Tests des émetteurs d’angle de barre LF3000/LFI3000 Mk2 Alignez la barre à zéro. Réglez le régime moteur sur 3 à 4000 t/min et observer l’indicateur d’angle de barre du pilote automatique, un écart de 2° dans l’affichage est acceptable. Si l’angle de barre affiché est supérieur à 2°, connectez le câble d’écran TB1 (LFI3000) au bornier central et répétez l’étape 2 (Voir AC12/AC42 dans le Manuel d’installation).
- Page 71 à rotation permanente. La tension de sortie vers les électrovannes est alors la même que la tension en entrée. Lors du test de barre, l’AP24 détermine automatiquement le type de l’unité de puissance entre moteur réversible ou pompe à électrovanne.
- Page 72 Embrayage: C’est le réglage par défaut qui permet de piloter le bateau manuellement quand le pilote automatique est en mode STBY. Le port (Drive engage) est activé sous tous les modes de barre du pilote automatique, et générale- ment active une vanne by-pass sur une unité de puissance linéaire hydraulique ou un embrayage sur une unité...
- Page 73 dernier est affiché, contrôlez les connexions électriques du système. Reportez-vous également au chapitre ”Alarmes” qui débute page 105. Décalage de profondeur Ces réglages s’appliquent uniquement aux sondes actives qui émettent les données au format NMEA2000. Lorsque le décalage de profondeur est réglé à zéro, la profondeur affichée est cellle mesurée sous la sonde (b).
- Page 74 Le symbole à côté de l’affichage de la profondeur est different selon que la profondeur affichée l’est à partir de: La quille la surface de l’eau Amplitude Par défaut Unités -10 - +10 0 – ±5: 0.1 m, ft 5 – 10: 0.5 Pressez la touche MENU pour confirmer le réglage de profondeur.
- Page 75 Angle/Vent Minimum Cette fonction n’est disponible que lorsque ‘le type de bateau’ est réglé sur ‘Voile’ dans le Menu installation. L ‘Ang/Vent Mini’ est l’angle de vent apparent minimum qui conserve un bon profil aux voiles et une composante de propulsion acceptable. Ce paramètre varie d’un bateau à...
- Page 76 L'écran ‘Nav chg limit’ limite de changement de cap peut être aussi activé à partir de l'écran principal du mode Nav en pressant la touche MENU puis la touché MODE pendant 2 secondes. Amplitude Change par pas Par défaut Unités 10-30 °...
- Page 77 Type de bateau Quand le pilote est configuré pour un Feedback Virtuel le Type de bateau est automatiquement réglé sur Outboard (Hors-bord). Calibration du capteur d'angle de barre (Non applicable en mode VRF) Valeurs par défaut utilisées: +/-35° Reportez-vous aux pages 68 à 69 pour le réglage de la tension de l’unité...
- Page 78 Quand la barre commence à se déplacer vers Tribord, relâchez et pressez la touche pour confirmer. Continuez à suivre les instructions affichées. Avec la barre à fond à Tribord, tournez très légèrement la barre à bâbord pour libérer la pression hydraulique. Confirmez en pressant la touche Relâchez immédiatement la touche quand la barre...
- Page 79 Réglages en mer Ce menu présente les réglages et les étalonnages automatiques à effectuer en mer. Les réglages en mer doivent toujours être effectués en eaux libres à bonne distance de tous les autres navires. Ce menu n’est disponible que lorsque les réglages à quai ont été...
- Page 80 Avant de commencer l’étalonnage du compas, assurez- vous de disposer de suffisamment d’eau libre pour parcourir un cercle complet avec le bateau. Pour des résultats satisfaisants, l’étalonnage doit être effectué avec peu de vent. Parcourez un cercle complet dans un délai de 60 à 90 secondes. 1.
- Page 81 Voir l’illustration page suivante. L’étalonnage est opéré sur le compas actif pour le pilote automatique. Si vous connecter un autre modèle de compas (Simrad ou autre), effectuez son étalonnage en vous référant à son manuel d’installation. Ligne de foi Ligne de foi...
- Page 82 Changez le paramètre de décalage de façon à ce que le relèvement de l’amer et la lecture du compas soient identiques Assurez-vous que le cap compas et le relèvement de l’objet sont exprimés dans la même unité (°M ou °T). Confirmez le décalage en pressant la touche MENU Décalage de la girouette Ce décalage ne s’applique que lorsqu’un capteur de...
- Page 83 Pressez la touche MENU pour confirmer la valeur du décalage. Etalonnage de la vitesse du bateau Le profilé de la coque ou la position des capteurs de vitesse peuvent générés une lecture erronée de la vitesse, et il peut être nécessaire d’étalonner les données pour assurer l’exactitude de la valeur de la vitesse affichée.
- Page 84 Par défaut 0.50–1.50 0.01 1.00 Transition HI-LO La Transition HI-LO est la vitesse à laquelle l’AP24 substitue automatiquement les paramètres LO aux paramètres HI, ou vice versa (page 13). Le réglage par défaut de la vitesse de transition est 6 nœuds.
- Page 85 à quai. Cette procédure est optionnelle et n’est pas nécessaire au fonctionnement de l’AP24. Les paramètres de barre sont préréglés par défaut à des valeurs qui doivent convenir à la plupart des bateaux de 30 à 50 pieds.
- Page 86 Activez la procédure en pressant la touche Aprés un Réglage automatique, aucun réglage supplémentaire n’est normalement nécessaire. Le “réglage fin” de ces paramètres est effectué par le contrôle de réponse (voir page 15). Cependant, il est possible d’afficher ou de modifier ces paramètres dans le mode AUTO en entrant ‘Installation’...
- Page 87 Rappel des réglages auto Pour rétablir les valeurs des paramètres programmés lors du Réglage auto, sélectionner Rappel Reglage Auto dans Barre Auto, et pressez la touche Confirmez en pressant la touche Reglage manuel Les paramètres de barre peuvent être consultés et modifiés via ce menu.
- Page 88 Type de navire Votre bateau Coque Paramètre Coque à Réglage planante affiché déplacement automati Manuel et hors- et voilier bord Barre HI 0.50 0.30 Contre barre HI 1.40 1.40 Autotrim HI 40 sec. 40 sec. Lim. de barre HI 6.0° 6.0°...
- Page 89 • Lorsque le paramètre Barre est trop faible le pilote automatique ne parvient pas à suivre un cap stable • Lorsque le paramètre Barre est trop fort le pilotage est instable et le bateau ralentit • Une vitesse lente nécessite un réglage de barre plus fort qu’une vitesse rapide Voir aussi “...
- Page 90 La valeur standard de l’Autotrim est 40 secondes ce qui convient à la plupart des bateaux. Régle de conversion (rule of thumb): régler la même valeur (secondes) que la longueur en pieds du bateau. Sur les bateaux fonctionnant en VRF il doit être réglé à 20 secondes.
- Page 91 Tiller. • Vérifiez le bon transfert des Waypoints du navigateur vers le système et vérifiez que l’AP24 suit bien les consignes de cap vers les points de route pour chacun d’entre eux. •...
- Page 92 • Dispensez une formation à l’utilisateur final. Formation de l’utilisateur final Il est impératif de fournir à l’utilisateur final, la formation nécessaire à l’utilisation des fonctions opérationnelles de base: • Mise en marche et arrêt du système • Changer de mode. Expliquez brièvement les fonctions de chaque mode •...
- Page 93 Etalonnage Le menu calibration est une autre entrée pour les procédures d’étalonnage du compas, de l’émetteur d’angle de barre, de la profondeur, de l’angle du vent apparent et de la vitesse du bateau. Ces procédures sont accessibles sous la rubrique ‘Commissioning’. Unité...
- Page 94 La fonction est réglable manuellement si le réglage automatique ne fonctionne pas de manière satisfaisante en raison d’une trop grande inertie de la barre et d’un système de barre trop souple. Recherchez la plus petite valeur possible empêchant la barre de chasser. Un secteur mort trop large altère la précision du pilotage automatique.
- Page 95 Paramétrage SimNet Les appareils SimNet peuvent faire partie de groupes et être identifiés par un numéro d’instance. Groupes SimNet La fonction groupe SimNet permet un contrôle global des paramètres de réglage des groupes d’appareils. Cette fonction est utilisée sur les unités de grande taille où plusieurs appareils sont connectés via le réseau SimNet.
- Page 96 Simrad, Aucun, 1-6 Simrad Alarmes Simrad, Aucun, 1-6 Simrad - Simrad: Groupe par défaut pour AP24 - Aucun: n’est pas assigné à un groupe - 1–6: Numéros des groupes Le schéma ci-dessous montre comment les instruments sur une passerelle et dans un cockpit sont assignés à des groupes différents de langue, de temporisation et de...
- Page 97 Langue = None PASSERELLE (aucun) Afficheur = 1 Tempo = 1 COCKPIT Afficheur Configuration et Paramétrage | 95...
- Page 98 Numéro d’instance Cette rubrique permet d’identifier plusieurs appareils d’un même modèle lorsqu’ils sont connectés à un réseau SimNet ou NMEA2000. Le numéro d’instance est ajouté au nom du produit, par ex. AP24-1, AP24-2 pour en faciliter l’identification. Amplitude Valeur par défaut 0-20 3.3 Service Information...
- Page 99 A propos En sélectionnant le menu A propos AP24, une fenêtre affiche le modèle de pilote, numéro de série, le numéro de la version du logiciel (1.2.), sa date de délivrance (00).
- Page 100 Page blanche 98 | Configuration et Paramétrage...
- Page 101 4 Alarmes 4.1 Indication d’alarme Le système d’alarme dans l’AP24 est activé en cas de dépassement des réglages programmés. Reportez-vous à Alarmes, page 50. Quand une alarme se déclenche, elle est signalée par un texte et une alarme sonore. Les différentes indications d’alarmes sont répertoriées ci-...
- Page 102 4.2 Accusé réception d’une alarme Une pression sur une touche quelconque suffit pour accuser réception d’une alarme. Cela aura pour effet d’enlever la notification d’alarme (texte, lumière et son) de tous les appareils appartenant au même groupe d’alarme. Reportez-vous à Groupes SimNet, page 93. Un rappel réapparaît à...
- Page 103 Code alarme Alarme Profondeur –alarme haute Profondeur –alarme basse Alarme de mouillage Changement de vent Vitesse vent vrai alarme haute Vitesse vent vrai alarme basse Vitesse bateau trop basse Tension trop élevée Tension trop basse Données de profondeur manquantes Données de vent manquantes Données de navigation manquantes Données de compas manquantes Ecart de cap...
- Page 104 Page blanche 102 | Système d’alarme...
- Page 105 5 Dysfonctionnements Un pilote automatique est un système complexe. Ses performances dépendent de la qualité de l’installation et du succès du test en mer. Le Menu principal comporte une rubrique Service qui donne accès à plusieurs options d’affichage des données en cas de tests ou de dysfonctionnement du système.
- Page 106 Dans le cas d’une réinitialisation du pilote, reportez-vous au chapitre 3.2. Reset Global La réinitialisation globale réinitialise la totalité des réglages SimNet du Groupe Simrad et crée un nouveau réglage automatique de l’interface. Voir chapitre 3.1. 104 | Dysfonctionnements...
- Page 107 Défaillances du pilote automatique En cas de défaillance, les nombreuses fonctions de test de l’AP24’s permettent de détecter la cause probable de la panne. Une alarme sonore et visuelle signale chaque panne détectée, voir chapitre 4.
- Page 108 Affichage Cause probable Action conseillée Shallow water La profondeur est Observez soigneusement inférieure au minimum l’affichage de la profondeur programmée ou actuelle supérieure à l’échelle de Réglez le seuil d’alarme si la portée du sondeur profondeur mesurée n’est pas Données de profondeur dangereuse manquantes Ralliez des eaux saines, l’...
- Page 109 Affichage Cause probable Action conseillée Rudder test Effectuez les actions spécifiques à Les conditions suivantes failed la cause probable diagnostiquée. doivent être remplies: Panne de l’émetteur d’angle de barre Dépassement de la puissance électrique du calculateur Surcharge de la vanne By- pass ou de l’embrayage Le safran pivote dans une Contrôlez les connexions.
- Page 110 Affichage Cause probable Action conseillée Bypass/clutch Courant de l’embrayage Contrôlez l’intensité réelle du overload ou du by-pass supérieur à courant 3.3 Amps (surcharge ou Contrôlez l’étiquette de tension sur court- circuit). la bobine Mesurez la résistance de la bobine (aux fils de connexion) Bypass/clutch Mauvaise connexion ou Contrôlez les connexions...
- Page 111 Affichage Cause probable Action conseillée Depth data Données de profondeur Contrôlez capteur/câbles de missing manquantes ou non profondeur valides Wind data Données de vent Contrôlez capteur/câbles de vent missing manquantes ou invalides Wind shift Les sautes de vent Re-entrez en mode Vent pour dépassent ‘Les limites de réinitialiser l’affichage des sautes saute de vent’...
- Page 112 Page blanche 110 | Dysfonctionnements...
- Page 113 6 Entretien 6.1 Généralités Les instruments AP24 ne se réparent pas mais sont remplacés, et c’est par conséquent un minimum d’entretien préventif qui est demandé à l’utilisateur. 6.2 Pupitre de commande En conditions normales d’utilisation le pupitre de commande de l’AP24 ne demande que très peu d’entretien.
- Page 114 6.6 Unité de puissance Appliquez les instructions d’entretien dispensées dans le manuel de l’unité de puissance. 6.7 Changement de logiciel Contactez le service à la clientèle de Simrad pour la mise à jour des logiciels. 112 | Entretien...
- Page 115 Une pression prolongée permet automatiques de modifier automatiquement le sont actifs cap à la vitesse de 3° par quand un témoin Simrad R3000X seconde. est allumé. La touche de mode passe successivement d’un mode à l’autre selon le tableau suivant.
- Page 116 Tribord. 7.4 AP24 avec MSD50 Ce chapitre concerne uniquement les pilotes automatiques équipés de Simrad MSD50 Stern Drive. The MSD50 Stern drive nécessite un réglage du point zéro après la mise en marche du pilote. Reportez-vous au manuel d’utilisation duMSD50 pour plus d’informations.
- Page 117 Réglage du point zéro A moins d’avoir besoin de l’affichage de l’angle de barre en quittant le quai, barrez le bateau manuellement sur une route droite et pressez la touche AUTO. Le point zéro se règle alors automatiquement. Si vous préférez utiliser l’affichage de l’angle de barre en quittant le quai, procédez comme suit: L’angle de barre une fois activé...
- Page 118 Page blanche 116 | Equipement en option...
- Page 119 8 Glossaire Alarme d’arrivée – Signal d’alarme émis par un GPS ou un traceur de cartes avertissant de l’arrivée à un point de route ou à une distance préprogrammée d’un point de route (voir cercle d’arrivée). BTW – Relèvement d’un point de route spécifique depuis la position actuelle.
- Page 120 états, avec d’autres équipements compatibles via un unique canal de transmission. Nom de produit – Nom d’un produit Simrad utilize pour la vente du produit et la rédaction de documents de tous types.
- Page 121 SimNet. Une fois connectés au réseau SimNet ils captent automatiquement la première source disponible de données SimNet et s’y verrouillent. Lorsqu’un appareil Simrad de Classe 1 est ajouté au groupe Simrad, les appareils de Classe 2 sont automatiquement asservis à la sélection de la source de Classe 1.
- Page 122 considération tous les facteurs tels que la dérive et les courants. XTE – Ecart traversier – Mesure utilisée pour définir la position d’un navire sur une perpendiculaire à la droite tracée entre deux points de route. La mesure de l’écart à droite ou à...